概述
产品 SKU
| 参数 | PRO | EDU |
|---|---|---|
| 渲染图 |  | |
| 产品尺寸(站立)(长 x 宽 x 高) | 67cm x 35cm x 56cm | 67cm x 35cm x 56cm |
| 产品净重(不含电池) | 15.8kg | 15.8kg |
| 最大功率 | 3200W | 3200W |
| 供电电压 | 22V-36V | 22V-36V |
| 自由度 | 13 | 13 |
| 基础算力 | 8 核高性能 CPU | 8 核高性能 CPU |
| 最大速度 | 3.0m/s | 3.0m/s |
| 最大载荷 | 10kg | 10kg |
| 最大攀爬落差高度 | 16cm | 16cm |
| 最大爬坡角度 | 40° | 40° |
| 续航 | 1.5-3.0h | 1.5-3.0h |
| 执行器类型 | 高功率密度运动单元 | 高功率密度运动单元 |
| 最大关节扭矩 | 约 37.5N·m | 约 37.5N·m |
| 铝合金精密关节电机 | 12个 | 12个 |
| 关节运动空间(机身) | -37.0°-45.0° | -37.0°-45.0° |
| 关节运动空间(大腿) | -207.5°-72.5° | -207.5°-72.5° |
| 关节运动空间(小腿) | -143.0°-30.0° | -143.0°-30.0° |
| MIC 阵列 | ● | ● |
| 4K 相机 | ● | ● |
| 双目相机 | ● | ● |
| 超广角相机 | ● | ● |
| 深度相机 | ● | ● |
| 超声波传感器 | ● | ● |
| 触摸传感器 | ● | ● |
| 激光雷达 | ● | ● |
| 智能跟随 | ● | ● |
| 情感引擎 | ● | ● |
| 头身联动 | ● | ● |
| 全地形模式 | ● | ● |
| 动作模仿 | ● | ● |
| 人体识别 | ● | ● |
| 巡游模式 | ● | ● |
| 智能避障 | ● | ● |
| 图形化编程 | ● | ● |
| 动作特技 | ● | ● |
| 表情显示 | ● | ● |
| 灯光显示 | ● | ● |
| AI 语音交互 | ● | ● |
| 触摸交互 | ● | ● |
| 拍照录像 | ● | ● |
| 实时图传 | ● | ● |
| 二次开发 | ○ | ● |
| 安装拓展坞 | ○ | 选配 |
| 提手 | ● | ● |
| 电池 | 29.6V 8200mAh 240.7W 快拆 | 29.6V 8200mAh 240.7W 快拆 |
| 适配器 | 33.6V 3.5A 149W | 33.6V 3.5A 149W |
| 电池充电座 | ● | ● |
部件列表
包装部件如下: 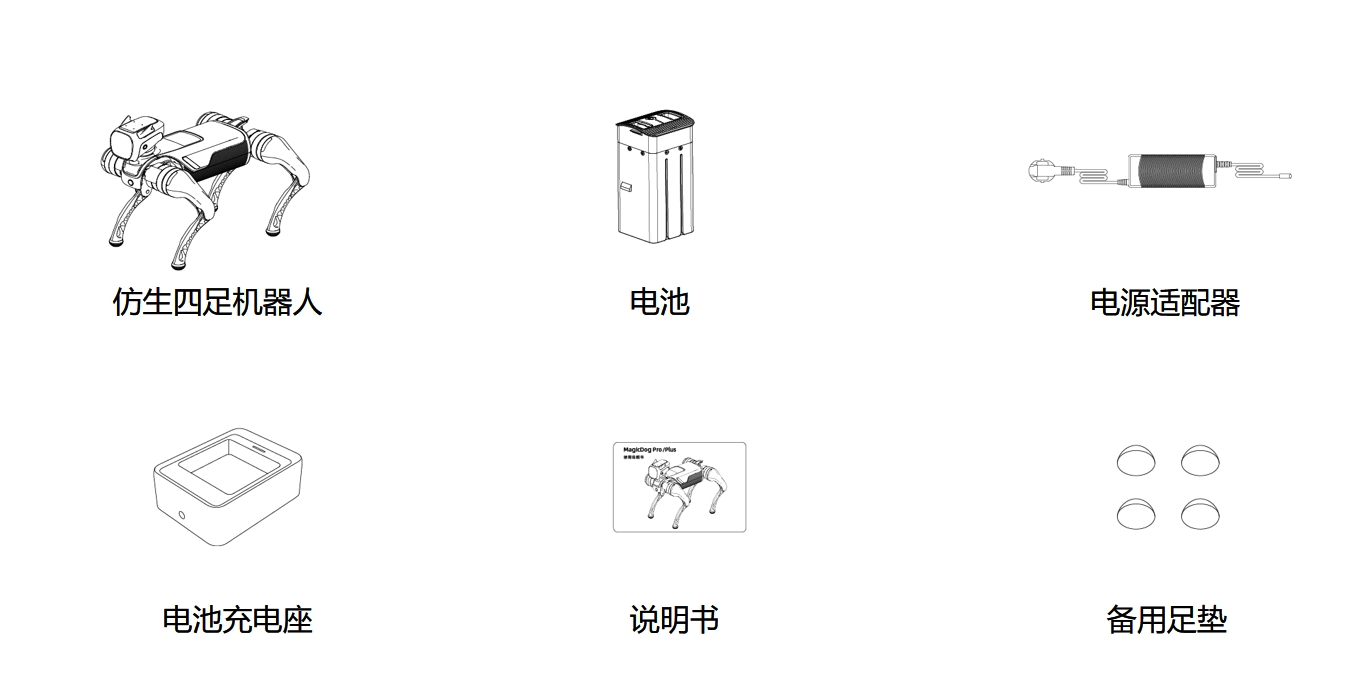
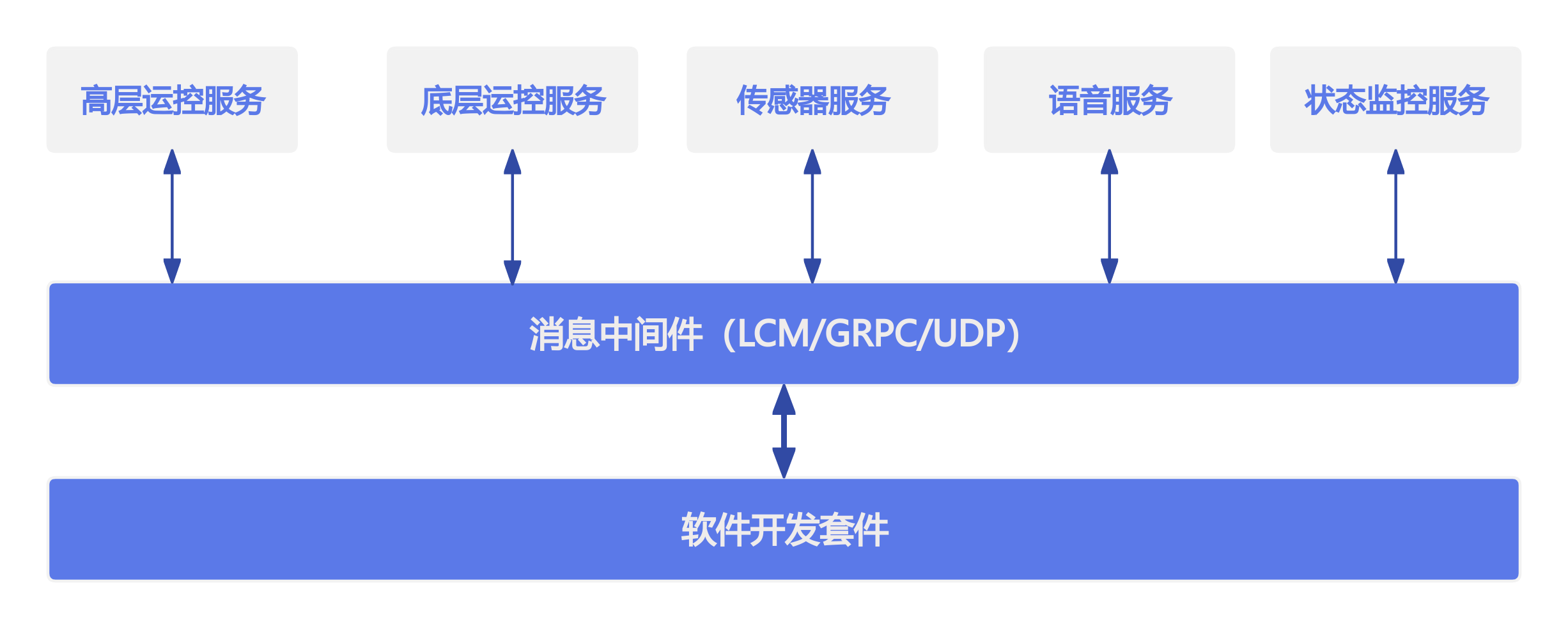
系统架构
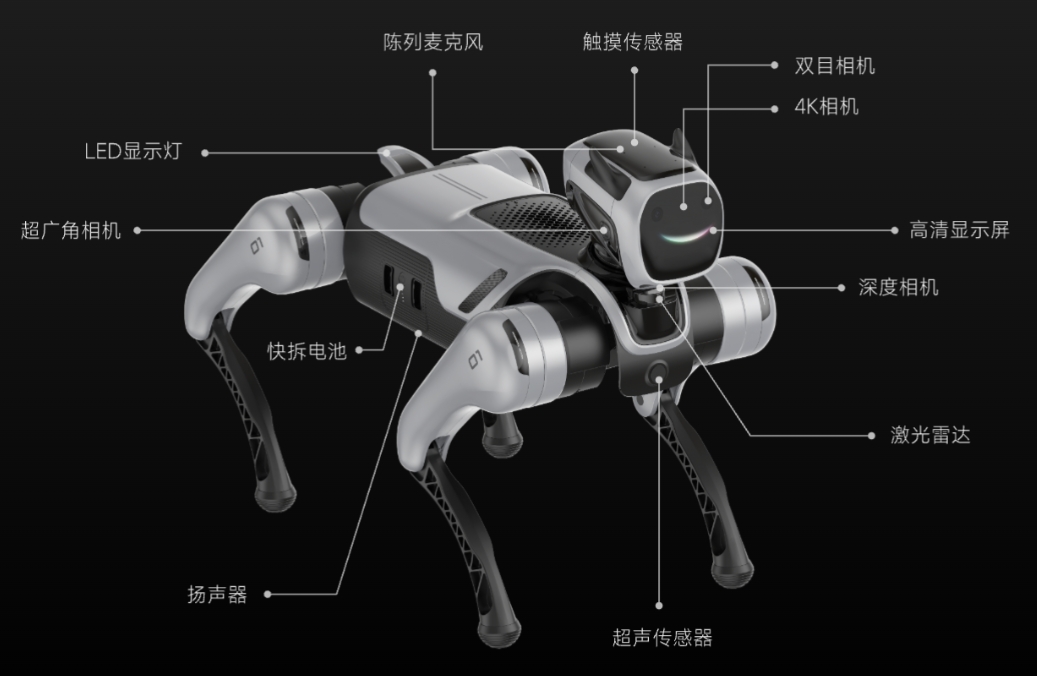
部件名称
电气接口
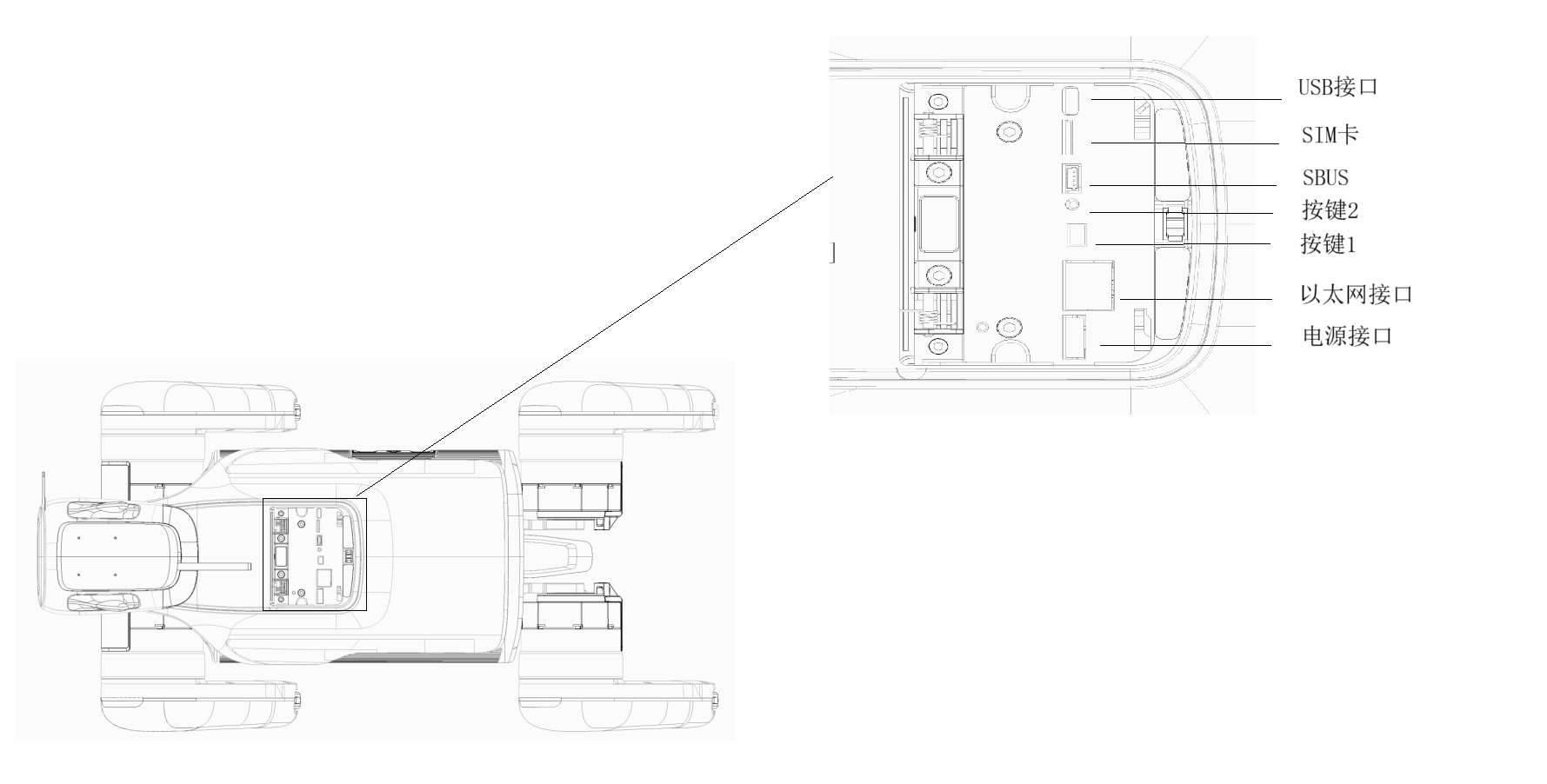
- 电源接口 输出范围22V~33.6V,给外部设备供电。接口带负载检测引脚,用于控制电源输出。
- 以太网接口 标准 RJ45,连接 PC 等外部设备
- 按键1 群控/单控按键
- 按键2 配网按键
- SBUS 接口 UART 通信接口
- SIM 卡 SIM 卡接口,4G 联网使用。
- USB 接口 标准 TypeC 接口,支持 USB2.0/USB3.0。
雷达
激光雷达 STL-19P 采用 DTOF 技术,可进行每秒 5000 次测距,用于运动避障。
技术规格如下:
| 参数 | 开发计算单元 |
|---|---|
| 测距范围 | 0.03-12米(80%反射率白靶测试) |
| 测距精准度 | ±30mm @ 2-12m(白靶),标准差 15mm |
| 扫描频率 | 最小 6 Hz,典型 10 Hz,最大 13 Hz |
| 测距频率 | 5000 Hz(固定频率) |
| 俯仰角误差 | 最小 0.5°,最大 2° |
| 偏航角误差 | 最小 -1°,典型 0°,最大 1° |
| 角度分辨率 | 典型 0.72° @ 10 Hz |
| 抗环境光能力 | 最大 60 KLux(参照乐动的环境光测试规范) |
| 雷达噪音 | 典型 45 dB(雷达正向水平放置,距离30厘米,噪声仪型号 AR824 测试) |
| 整机寿命 | 10000 小时 |
| 工作温度 | -10°C 至 45°C |
| 存储温度 | -30°C 至 70°C |
| 防护等级 | IP5X(详见备注“防尘防水”) |
指示灯
尾灯的状态含义如下:
| 参数 | 开发计算单元 |
|---|---|
| 红色灯常亮 | 电量低于20%,设备异常 |
| 白色灯常亮 | 设备正常,任务完成 |
| 白色灯快闪3次 | 任务处理中 |
| 白色灯熄灭 | 关机状态 |
| 蓝色灯闪烁3次 | 模式切换 |
| 红色灯常亮 | 电量低,设备异常 |
摄像头
| 参数 | 开发计算单元 |
|---|---|
| 4K 相机 | 人形识别 |
| 双目相机 | |
| 超广角相机 | 避障 |
| 深度相机 | 避障 |
关节
四足机器人像动物一样,身体(Trunk)和四肢(Leg)都是左右对称的。四条腿,按照前后分成两组,
这两组除了前后不同,坐标系和关节活动范围等都相同的。
各腿的 index:
- 0: FR (front right)
- 1: FL (front left)
- 2: RR (rear right)
- 3: RL (rear left)
具体的参数表如下:
| 参数 | 关节限位 |
|---|---|
| FR_hip_joint | -0.65 ~ 0.79 rad |
| FR_thigh_joint | -1.27 ~ 3.62 rad |
| FR_calf_joint | -2.50 ~ -0.52 rad |
| FL_hip_joint | -0.79 ~ 0.65 rad |
| FL_thigh_joint | -1.27 ~ 3.62 rad |
| FL_calf_joint | -2.50 ~ -0.52 rad |
| RR_hip_joint | -0.65 ~ 0.79 rad |
| RR_thigh_joint | -1.27 ~ 3.62 rad |
| RR_calf_joint | -2.50 ~ -0.52 rad |
| RL_hip_joint | -0.79 ~ 0.65 rad |
| RL_thigh_joint | -1.27 ~ 3.62 rad |
| RL_calf_joint | -2.50 ~ -0.52 rad |
坐标系,关节旋转轴与关节零点
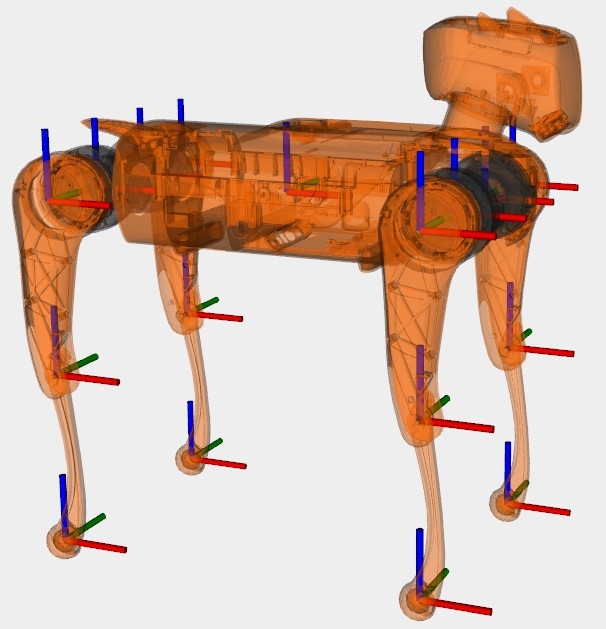
机身关节旋转轴为 x 轴,大腿关节和小腿关节的旋转轴为 y 轴,旋转正方向符合右手定则。
机器人规格
尺寸
| 参数 | 开发计算单元 |
|---|---|
| 裸机长宽高(站立) | 67cm * 35cm * 56cm |
| 裸机长宽高(趴下) | 72cm * 44cm * 29cm |
| 裸机净重(不含电池) | 约15kg |
| 自由度 | 13 |
| 最大速度 | 3.0m/s |
环境
| 参数 | 开发计算单元 |
|---|---|
| 工作温度 | 5℃-35℃,天气良好环境下运行 |
| 斜坡 | +/- 30° |
| 最大台阶高度 | 15cm |
内部相关
| 参数 | 开发计算单元 |
|---|---|
| 处理芯片 | 8核处理器 |
| 4G | 可插 SIM 卡 |
| Wi-Fi | WiFi 6 双频无线802.11x |
| 蓝牙 | 5.2/4.2/2.1 |
| 存储空间 | 64G |
| 输出电源 | DC 28.8V(电池电压) |
| 连接 | RJ45 以太网口 |
深度相机
| 参数 | 开发计算单元 |
|---|---|
| 尺寸 | 124mm*29mm*26mm |
| 最小深度距离 | 0.105米 |
| 深度图像分辨率 | 1280*720 @ 30fps;848*480 @ 90 fps |
| 深度视场角 | 86° * 57° (±3°) |
4K 相机
| 项目 | 参数说明 |
|---|---|
| 图像传感器 | 1/3.06inch CMOS Sensor |
| 最大分辨率 | 3840H×2880V |
| 像素大小 | 1.12um*1.12um |
| 曝光系统 | 自动曝光 / Auto Exposure |
| 电子快门 | 滚动快门 / Rolling Shutter |
| 接口速度 | 480MB/S (USB2.0) |
| 工作温度 | 0℃ ~ 60℃ |
| 存储温度 | 0℃ ~ 65℃ |
| 焦距 | 2.22MM |
| 视场角 | D:117° H:94.8° V:76.7° |
| 畸变 | <10.3% |
| 光谱特性 | 无 IR (No filter) |
| 光圈 | 2.2±5% |
双目相机
| 参数 | 参数说明 |
|---|---|
| 图像传感器 | 1/4inch CMOS Sensor |
| 最大分辨率 | 2560H×720V |
| 像素大小 | 3.0um*3.0um |
| 信噪比 | 38dB |
| 动态范围 | 63.9dB |
| 曝光系统 | 自动曝光 / Auto Exposure |
| 电子快门 | 全局快门 / Global shutter |
| 接口速度 | 480MB/S (USB2.0) |
| 工作温度 | 0℃ ~ 50℃ |
| 储存温度 | 0℃ ~ 60℃ |
| 连接接口 | 5-pin 1.25mm USB2.0 |
| 图像显示方向 | 图像正立 |
| 焦距 | 3.15MM |
| 视场角 | D:162° H:135° V:73° |
| 畸变 | <14.3% |
| 光谱特性 | 650nm (滤光片 Optical filter) |
| 光圈 | 2.35 |
广角相机
| 参数 | 参数说明 |
|---|---|
| 模组型号 | ZV-A0588-V5.1 |
| 模组尺寸 | 32.00mm × 32.00mm × 15mm |
| 工作温度 | -30°C to 80°C |
| 储存温度 | -10°C to 60°C |
| 相机板装配技术 | SMT (ROHS) |
| 拍照焦距距离 | 30CM~无穷远 |
| 供电电压 | USB_5V |
| 连接接口 | USB 2.0 -5P 1.25mm 间距 SMD 立贴 |
| 功率 | MAX 1W,电流 140mA~160mA |
| 操作系统 | Win XP、Win 7、Linux 2.6.20 以上版本 |
| 包装 | Anti-electrostatic tray |
| 传感器类型 | (1/2.7”) |
| 最高有效像素 | 200 万像素(WDR) |
| 最大动态范围 | 85db |
| 像素尺寸 | 3.0μm x 3.0μm |
| 镜头类型 | 1/2.7 inch |
| 镜头结构 | 6G+IR |
| 光圈 | 2.0 |
| 有效焦距 | 2.0mm |
| 视场角 | D:200° H:200° V:200° |
| 畸变 | 110% |
| 滤光片 | 650±10nm |
| 增益/曝光/白平衡 | Auto |