快速开始
系统环境
推荐在 Ubuntu 22.04 系统下开发,暂不支持 Mac/Windows 系统下开发。机器人本体 PC 运行官方服务,不支持开发环境。
开发环境要求
- GCC ≥ 11.4 (for Linux)
- CMake ≥ 3.16
- Make build system
- C++20 (minimum)
- Eigen3
- python3.10
第三方库依赖
sudo apt update
sudo apt install libgrpc++-dev libgrpc-dev liblcm-dev libyaml-cpp-dev libsystemd-dev -y
sudo apt install cmake python3 python3-dev python3-pip libeigen3-dev build-essential -y系统配置
首先,为了实现普通用户下通信实时性,需要在/etc/security/limits.conf文件中增加如下配置:
* - rtprio 98其次,为了增加每个socket链接的接收缓存,需要在/etc/sysctl.conf文件中增加如下配置,sudo sysctl -p立即生效或重启生效:
net.core.rmem_max=20971520
net.core.rmem_default=20971520
net.core.wmem_max=20971520
net.core.wmem_default=20971520网络环境
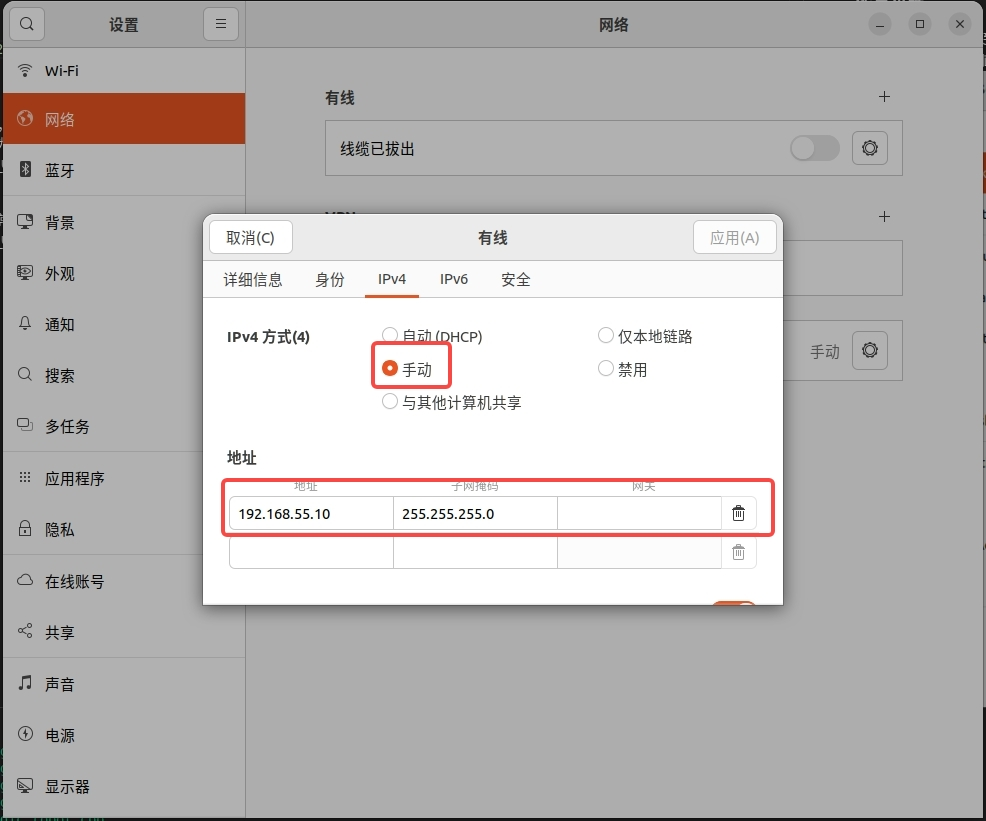
将用户计算机与机器人交换机接入统一网络。建议新用户使用网线将用户计算机接入机器人交换机,并将与机器人通信的网卡设置在 192.168.55.X 网段下,推荐使用 192.168.55.10。有经验的用户可自行配置网络环境。
假设 SDK 二次开发 PC 与机器人连接的网口为 eno1,需要进行如下配置以便 SDK 与机器人的底层通信:
sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eno1配置步骤
用网线的一端连接机器人,另一端连接用户电脑。机器人机载电脑的 IP 地址为 192.168.55.200,所以需要将电脑 ip 设置为同一网段,建议 192.168.55.10。
为了测试通信连接是否正常,可以通过 ping 进行测试:
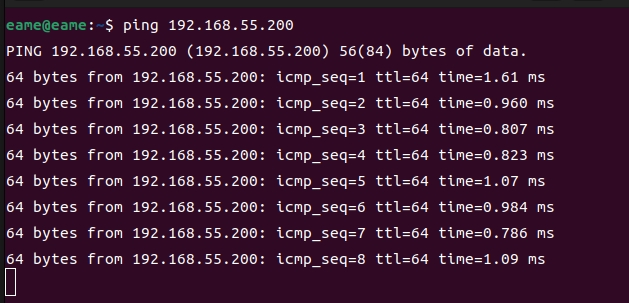
连通后,执行以下命令
sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eno1安装与编译
以下步骤假设工作目录为
/home/magicbot/workspace
安装 magicdog-sdk
cd /home/magicbot/workspace/magicdog_sdk/
mkdir build
cd build
cmake .. -DCMAKE_INSTALL_PREFIX=/opt/magic_robotics/magicdog_sdk
make -j8
sudo make install上述命令会把
magicdog_sdk安装到/opt/magic_robotics/magicdog_sdk目录下
例程编译
cd /home/magicbot/workspace/magicdog_sdk/
mkdir build
cd build
cmake ..
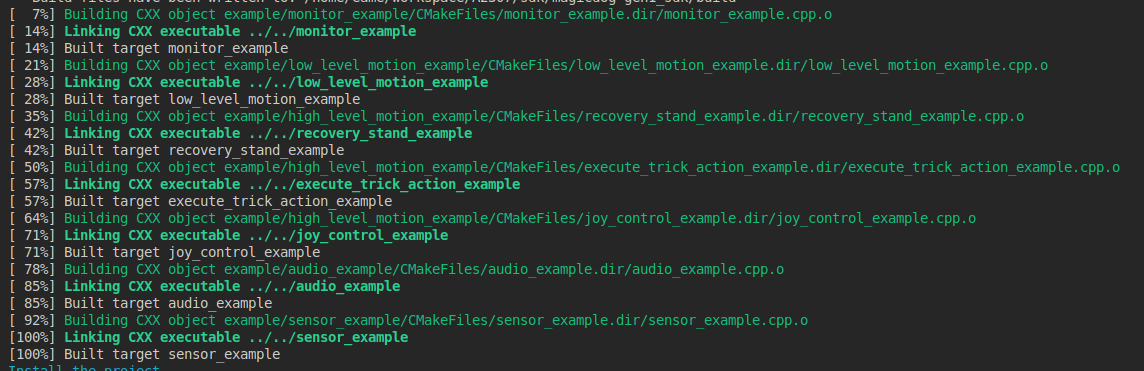
make -j8运行上述命令后,若进度进行到 100% 且没有报错,则意味着编译成功。
用户模块导入 magicdog-sdk
如果用户需要在自己的模块中引入 magicdog-sdk,可以参考 example/cmake_example/CMakeLists.txt
C++ 例程示例
magicdog_sdk/build目录中:
- 语音示例:
- audio_example
- 传感器示例:
- sensor_example
- 状态监控示例:
- monitor_example
- 底层运控示例:
- low_level_motion_example
- 高层运控示例:
- high_level_motion_example
进入调试模式:
按照操作流程,确保机器人进入调试模式
运行例程
进入magicdog_sdk/example/python目录,执行如下命令:
cd /home/magicbot/workspace/magicdog-sdk/build
# 环境配置
sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eno1
export LD_LIBRARY_PATH=/opt/magic_robotics/magicdog_sdk/lib:$LD_LIBRARY_PATH
# 语音示例
./audio_example
# 传感器示例
./sensor_example
# 状态监控示例
./monitor_example
# 底层运控示例
./low_level_motion_example
# 高层运控示例
./high_level_motion_examplePython 例程示例
magicdog_sdk/example/python目录中:
- 语音示例:
- audio_example.py
- 传感器示例:
- sensor_example.py
- 状态监控示例:
- monitor_example.py
- 底层运控示例:
- low_level_motion_example.py
- 高层运控示例:
- high_level_motion_example.py
进入调试模式:
按照操作流程,确保机器人进入调试模式
运行例程
进入magicdog_sdk/example/python目录,执行如下命令:
# 环境配置
sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eno1
export PYTHONPATH=/opt/magic_robotics/magicdog_sdk/lib:$PYTHONPATH
export LD_LIBRARY_PATH=/opt/magic_robotics/magicdog_sdk/lib:$LD_LIBRARY_PATH
# 语音示例
python3 audio_example.py
# 传感器示例
python3 sensor_example.py
# 状态监控示例
python3 monitor_example.py
# 底层运控示例
python3 low_level_motion_example.py
# 高层运控示例
python3 high_level_motion_example.py注意:手动执行
sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eno1只会生效一次,开机重启或者网线断连之后,需要重新执行
获取python api帮助信息:
cd /home/magicbot/workspace/magicdog_sdk/example/python
# 环境配置
export PYTHONPATH=/opt/magic_robotics/magicdog_sdk/lib:$PYTHONPATH
export LD_LIBRARY_PATH=/opt/magic_robotics/magicdog_sdk/lib:$LD_LIBRARY_PATH
$ python3
Python 3.10.12 (main, Aug 15 2025, 14:32:43) [GCC 11.4.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
# 导入Magicdog python SDK接口
>>> import magicdog_python
# 查看所有接口信息
>>> help(magicdog_python)
# 查看CameraInfo结构信息
>>> help(magicdog_python.CameraInfo)
# 查看HighLevelMotionController对象信息
>>> help(magicdog_python.HighLevelMotionController)
# 查看LowLevelMotionController对象信息
>>> help(magicdog_python.LowLevelMotionController)
# 查看SensorController对象信息
>>> help(magicdog_python.SensorController)
# 查看AudioController对象信息
>>> help(magicdog_python.AudioController)
# 查看StateMonitor对象信息
>>> help(magicdog_python.StateMonitor)