ROS2 SDK 使用说明
SDK 介绍
MagicDog_sdk 是魔法原子为新一代机器人开发的 SDK。SDK 将底层电机控制、高层运动控制、雷达点云数据、音视频图传、SLAM、里程计等接口进行封装,并提供相关的函数接口。您可以按照我们提供的接口和例程,完成机器狗的二次开发。
SDK 支持情况
MagicDog_sdk 目前支持的机器人为 MagicDog EDU 版。其他型号或版本的机器人不支持使用该 SDK 进行二次开发。
SDK 下载地址
https://github.com/MagiclabRobotics/magicdog_ros2_sdk
开始准备
安装 ROS 2
- ROS 2 Foxy version for Ubuntu 20.04 (推荐)
- ROS 2 Iron version for Ubuntu 22.04
安装 cyclone-dds
sudo apt install ros-foxy-rmw-cyclonedds-cpp编译
# 创建 ros2 工作空间
mkdir -p ~/ros2_ws/srccd ~/ros2_ws/src
git clone https://github.com/MagiclabRobotics/magicdog_ros2_sdk.git
# 解决库依赖问题
cd ~/ros2_ws
rosdep install -i --from-path src --rosdistro foxy -y
# source underlay source /opt/ros/foxy/setup.bash
# 编译
colcon build
# source source install/setup.bash个人电脑连接机器人
关闭个人电脑上的 wifi 和 dockers,
# check if docker exist on you PC
ifconfig | grep docker
# if sth appers, e.g. docker0
sudo ifconfig docker0 down个人电脑和机器人使用数据线连接。 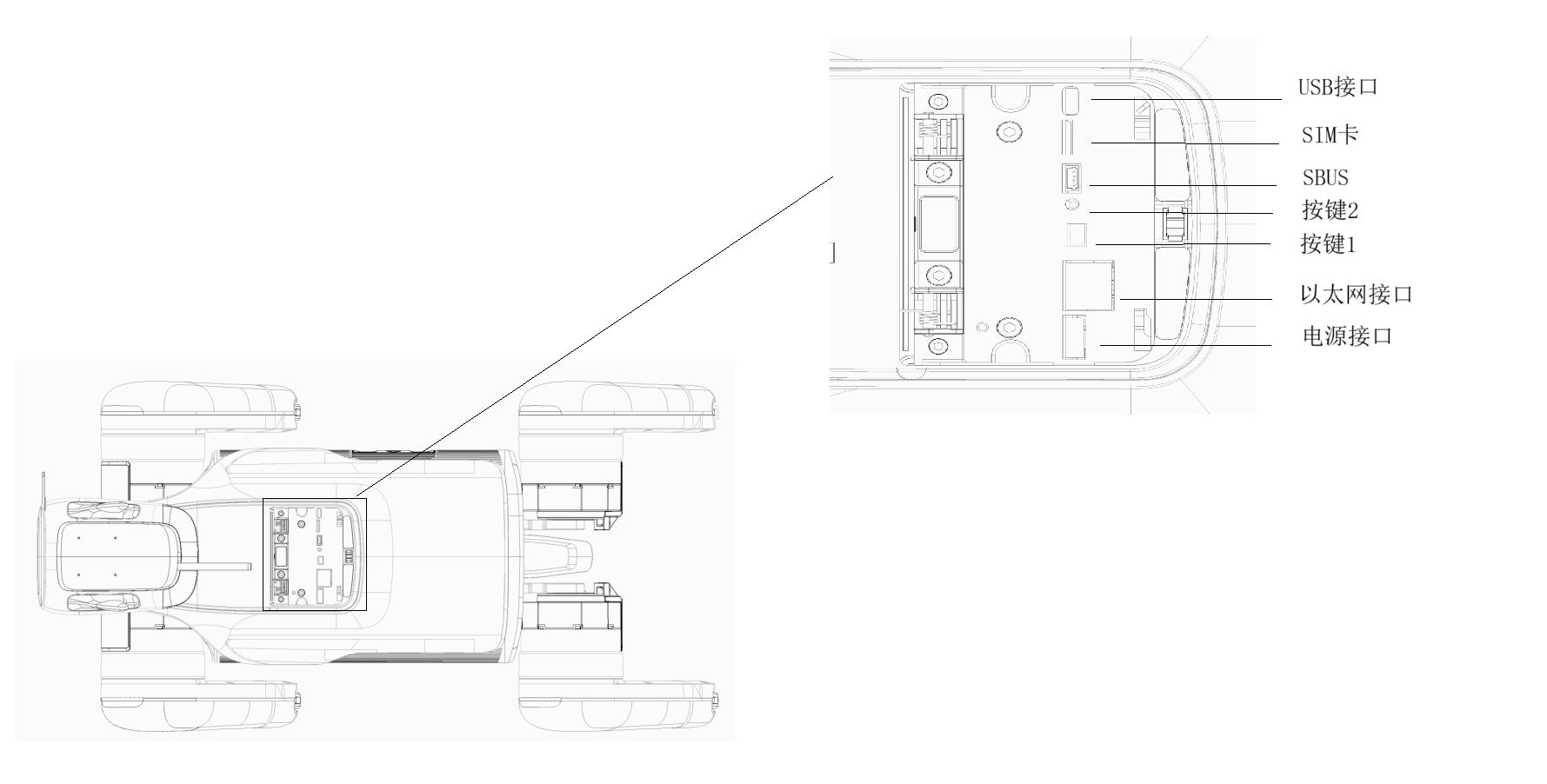

个人电脑上环境配置,
# 仅在该终端中起作用
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
export ROS_DOMAIN_ID=25
# 写入 ~/.bashrc 文件
echo "export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp" >> ~/.bashrc
echo "export ROS_DOMAIN_ID=25" >> ~/.bashrc使用 ROS 2 指令验证多机通讯是否配置成功,例,ros2 node list。记得 source 不同工作空间中的 setup 文件。