Low Level Motion Control Service
Provides low-level motion control services for the robot system. Through LowLevelMotionController, you can use topic-based communication to send joint commands and receive joint states.
Interface Definition
LowLevelMotionController is a motion controller for low-level development, supporting direct control and state subscription of leg and other moving parts.
LowLevelMotionController
| Item | Description |
|---|---|
| Function Name | LowLevelMotionController |
| Declaration | LowLevelMotionController(); |
| Overview | Constructor, initializes the low-level controller object. |
| Note | Constructs internal resources. |
~LowLevelMotionController
| Item | Description |
|---|---|
| Function Name | ~LowLevelMotionController |
| Declaration | virtual ~LowLevelMotionController(); |
| Overview | Destructor, releases resources. |
| Note | Cleans up low-level resources. |
Initialize
| Item | Description |
|---|---|
| Function Name | Initialize |
| Declaration | virtual bool Initialize() override; |
| Overview | Initializes the controller and establishes low-level connections. |
| Return Value | true means success, false means failure. |
| Note | Must be initialized on first call. |
Shutdown
| Item | Description |
|---|---|
| Function Name | Shutdown |
| Declaration | virtual void Shutdown() override; |
| Overview | Shuts down the controller and releases low-level resources. |
| Note | Used together with Initialize. |
SetPeriodMs
| Item | Description |
|---|---|
| Function Name | SetPeriodMs |
| Declaration | void SetPeriodMs(uint64_t period_ms); |
| Overview | Set control period time (milliseconds). |
| Parameter | period_ms: Period time in milliseconds. |
| Note | Non-blocking interface. The controller uses this period parameter internally to set the frequency of joint command sending. |
SubscribeLegState
| Item | Description |
|---|---|
| Function Name | SubscribeLegState |
| Declaration | void SubscribeLegState(LegJointStateCallback callback); |
| Overview | Subscribe to leg joint state data. |
| Parameter | callback: Callback function to handle received leg joint state data. |
| Note | Non-blocking interface. |
PublishLegCommand
| Item | Description |
|---|---|
| Function Name | PublishLegCommand |
| Declaration | Status PublishLegCommand(const LegJointCommand& command); |
| Overview | Publish leg joint control command. |
| Parameter | command: Leg joint control command containing target position/velocity and other control information. |
| Return Value | Status::OK means success, others mean failure. |
| Note | Non-blocking interface. |
EnableSendMsg
| Item | Description |
|---|---|
| Function Name | EnableSendMsg |
| Declaration | void EnableSendMsg(bool enable); |
| Overview | LCM channel switch |
| Parameter | enable: LCM channel switch information |
| Note | When using high-level motion control, turn off the LCM channel; when using low-level motion control, turn on the LCM channel. |
Type Definitions
SingleLegJointCommand — Control command for a single leg joint
| Field Name | Type | Description |
|---|---|---|
q_des | float | Desired joint position |
dq_des | float | Desired joint velocity |
tau_des | float | Desired feedforward torque |
kp | float | P gain, must be positive |
kd | float | D gain, must be positive |
LegJointCommand — Control command for the entire leg
| Field Name | Type | Description |
|---|---|---|
timestamp | int64_t | Timestamp (unit: nanoseconds) |
cmd | std::array<SingleLegJointCommand, kLegJointNum> | Array of control commands |
SingleLegJointState — State of a single leg joint
| Field Name | Type | Description |
|---|---|---|
q | float | Actual joint position |
dq | float | Actual joint velocity |
tau_est | float | Estimated torque |
LegState — State information for the entire leg
| Field Name | Type | Description |
|---|---|---|
timestamp | int64_t | Timestamp (unit: nanoseconds) |
state | std::array<SingleLegJointState, kLegJointNum> | All leg joint states |
URDF Reference
Introduction to Low Level Motion Control Robot States
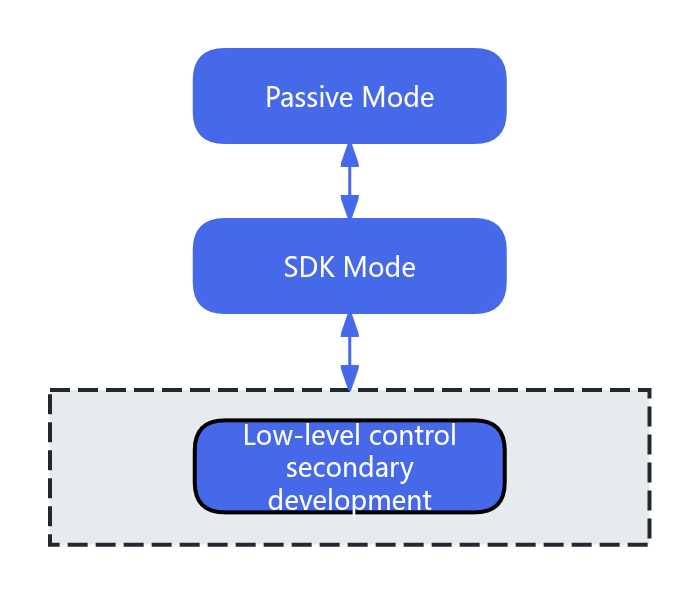
The robot's low-level motion mainly provides three-loop joint control for developers to enable secondary development of robot motion capabilities. The basic control state switching mechanism: