SDK Overview
SDK Communication Interface Introduction
- The current software version does not support GST video streaming.
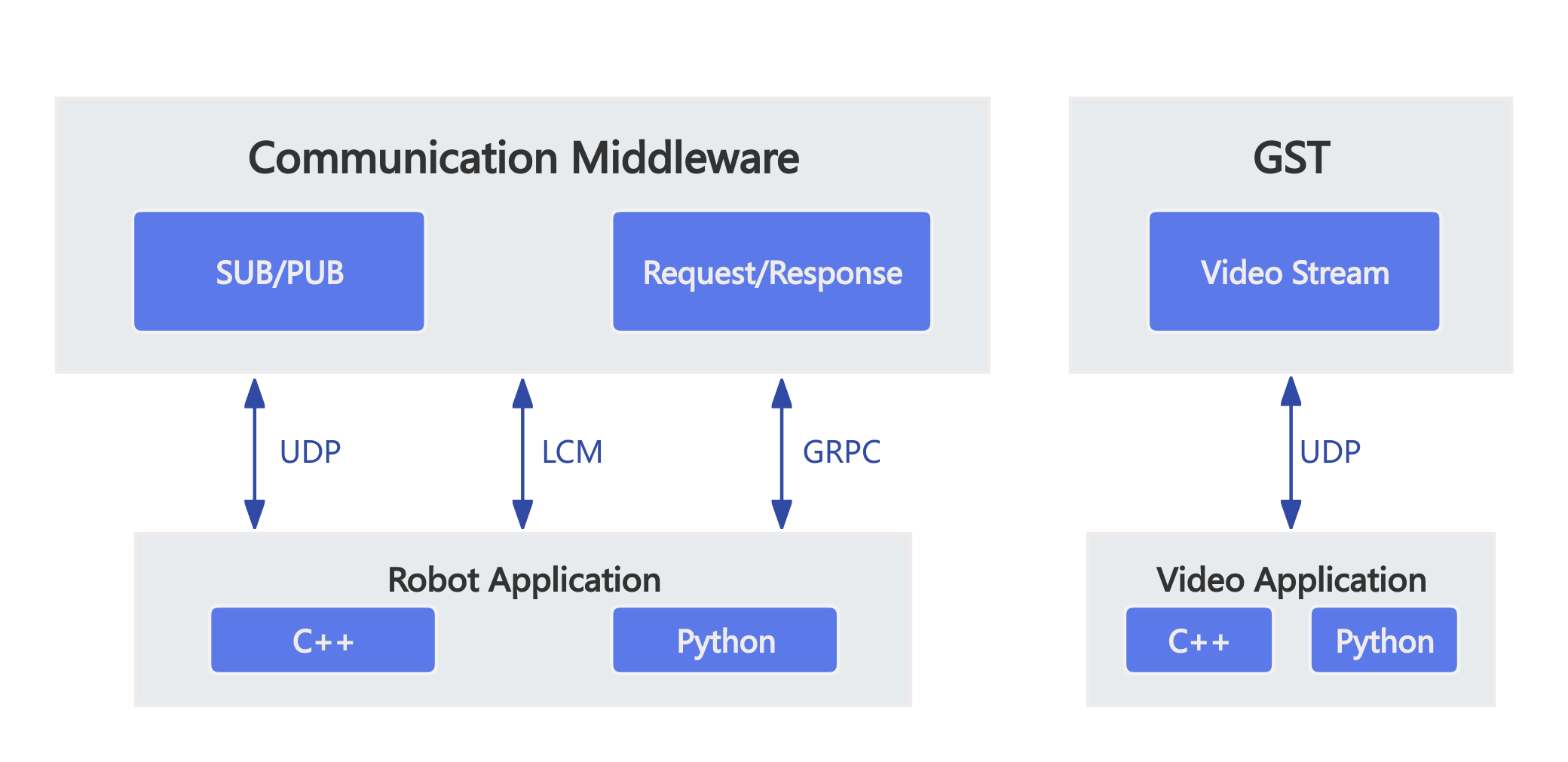
MagicDog uses LCM/GRPC/UDP as message middleware. The main data interaction modes are: Topic (Subscribe/Publish) and RPC (Request/Response).
- Topic (Subscribe/Publish): The receiver subscribes to a message, and the sender sends messages to the receiver based on the subscription list. This is mainly used for medium to high-frequency or continuous data interactions.
- RPC (Request/Response): Uses a question-and-answer mode, where requests are used to obtain data or perform control operations. This is used for low-frequency or function-switching data interactions.
The main way to call Topic and RPC interfaces: Functional Interface
- Functional Interface: API calls are encapsulated as function calls for user convenience.
Getting the SDK
magicdog-sdk is the new generation robot development SDK from MagicLab. This SDK fully encapsulates interfaces such as high-level motion control, low-level motor control, and voice control, and provides corresponding functional interfaces. You can refer to our SDK tutorials to learn robot control methods and complete secondary development for MagicDog.
SDK Download Link:
- Notice: Some interfaces and types in the official documentation may lag behind the iteration pace on Github due to the website release schedule. Please refer to the interface and type definitions on Github as the standard.