Low-Level Motion Control Service
Provides low-level motion control services for the robot system. Through the LowLevelMotionController, you can use topic-based communication to send joint commands and receive joint states.
Interface Definition
LowLevelMotionController is a motion controller designed for low-level development, supporting direct control and state subscription of leg and other moving parts.
LowLevelMotionController — Low-Level Motion Controller
| Item | Description |
|---|---|
| Class Name | LowLevelMotionController |
| Overview | Low-level joint motion controller providing precise joint control |
| Main Functions | Joint state subscription, joint command publishing, control period setting |
| Use Cases | Precise motion control, custom gait, research and development |
initialize
| Item | Description |
|---|---|
| Method Name | initialize |
| Declaration | bool initialize() |
| Overview | Initialize the controller and establish low-level connections. |
| Return Value | true for success, false for failure. |
| Note | Must be called before first use. |
shutdown
| Item | Description |
|---|---|
| Method Name | shutdown |
| Declaration | void shutdown() |
| Overview | Shut down the controller and release low-level resources. |
| Note | Used together with initialize. |
set_period_ms
| Item | Description |
|---|---|
| Method Name | set_period_ms |
| Declaration | void set_period_ms(int period_ms) |
| Overview | Set the control period in milliseconds. |
| Parameter | period_ms: Period in milliseconds. |
| Note | Non-blocking interface. The controller uses this period to set the frequency of joint command sending. |
subscribe_leg_state
| Item | Description |
|---|---|
| Method Name | subscribe_leg_state |
| Declaration | void subscribe_leg_state(callback) |
| Overview | Subscribe to leg joint state data. |
| Parameter | callback: Callback function to handle received leg joint state data. Function signature: callback(data : LegState) -> None |
| Note | Non-blocking interface. |
publish_leg_command
| Item | Description |
|---|---|
| Method Name | publish_leg_command |
| Declaration | Status publish_leg_command(LegJointCommand command) |
| Overview | Publish leg joint control commands. |
| Parameter | command: Leg joint control command containing target angles/velocities, etc. |
| Return Value | Status::OK for success, others for failure. |
| Note | Non-blocking interface. |
enable_send_msg
| Item | Description |
|---|---|
| Method Name | enable_send_msg |
| Declaration | Status enable_send_msg(bool enable) |
| Overview | LCM channel switch. |
| Parameter | enable: LCM channel switch information. |
| Return Value | Status::OK for success, others for failure. |
| Note | When using high-level motion control, turn off the LCM channel; when using low-level motion control, turn on the LCM channel. |
Data Structure Definitions
LegJointCommandArray — Leg Joint Command Array
| Item | Description |
|---|---|
| Type | Python binding of std::array<magic::dog::SingleLegJointCommand, magic::dog::kLegJointNum> |
| Overview | Fixed-size array of leg joint commands, containing control commands for all leg joints |
| Main Methods | Supports index access, iteration, and length query. Length is fixed to the number of leg joints. |
| Use Cases | Leg motion control, joint coordination control, gait planning |
LegJointStateArray — Leg Joint State Array
| Item | Description |
|---|---|
| Type | Python binding of std::array<magic::dog::SingleLegJointState, magic::dog::kLegJointNum> |
| Overview | Fixed-size array of leg joint states, containing real-time state information for all leg joints |
| Main Methods | Supports index access, iteration, and length query. Length is fixed to the number of leg joints. |
| Use Cases | Joint state monitoring, motion feedback, safety detection |
SingleLegJointCommand — Single Leg Joint Command Structure
| Field Name | Type | Description |
|---|---|---|
q_des | float | Desired joint angle |
dq_des | float | Desired joint angular velocity |
tau_des | float | Desired joint torque |
kp | float | Position gain |
kd | float | Velocity gain |
LegJointCommand — Leg Joint Command Structure
| Field Name | Type | Description |
|---|---|---|
timestamp | int | Timestamp |
cmd | LegJointCommandArray | List of joint commands |
SingleLegJointState — Single Leg Joint State Structure
| Field Name | Type | Description |
|---|---|---|
q | float | Joint angle |
dq | float | Joint angular velocity |
tau_est | float | Estimated joint torque |
LegState — Leg State Structure
| Field Name | Type | Description |
|---|---|---|
timestamp | int | Timestamp |
state | LegJointStateArray | List of joint states |
URDF Reference
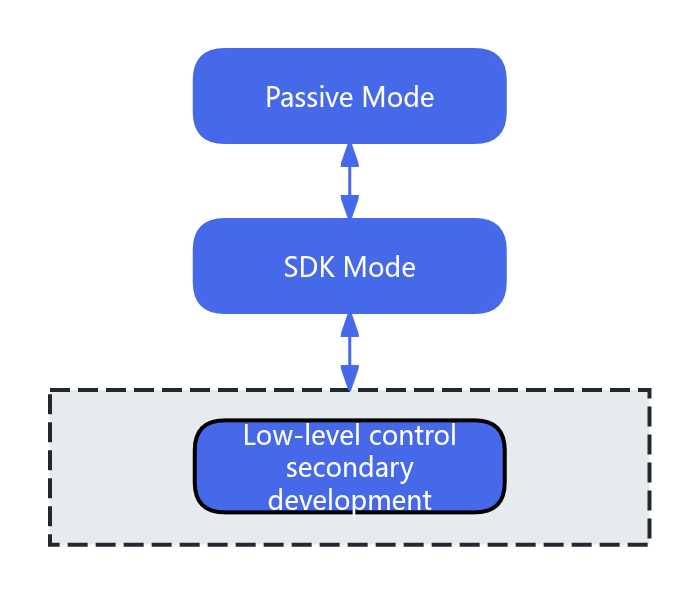
Introduction to Low-Level Motion Control Robot States
The robot's low-level motion mainly refers to the three-loop joint control, enabling developers to further develop the robot's motion capabilities. The basic control state switching mechanism: