Service Introduction
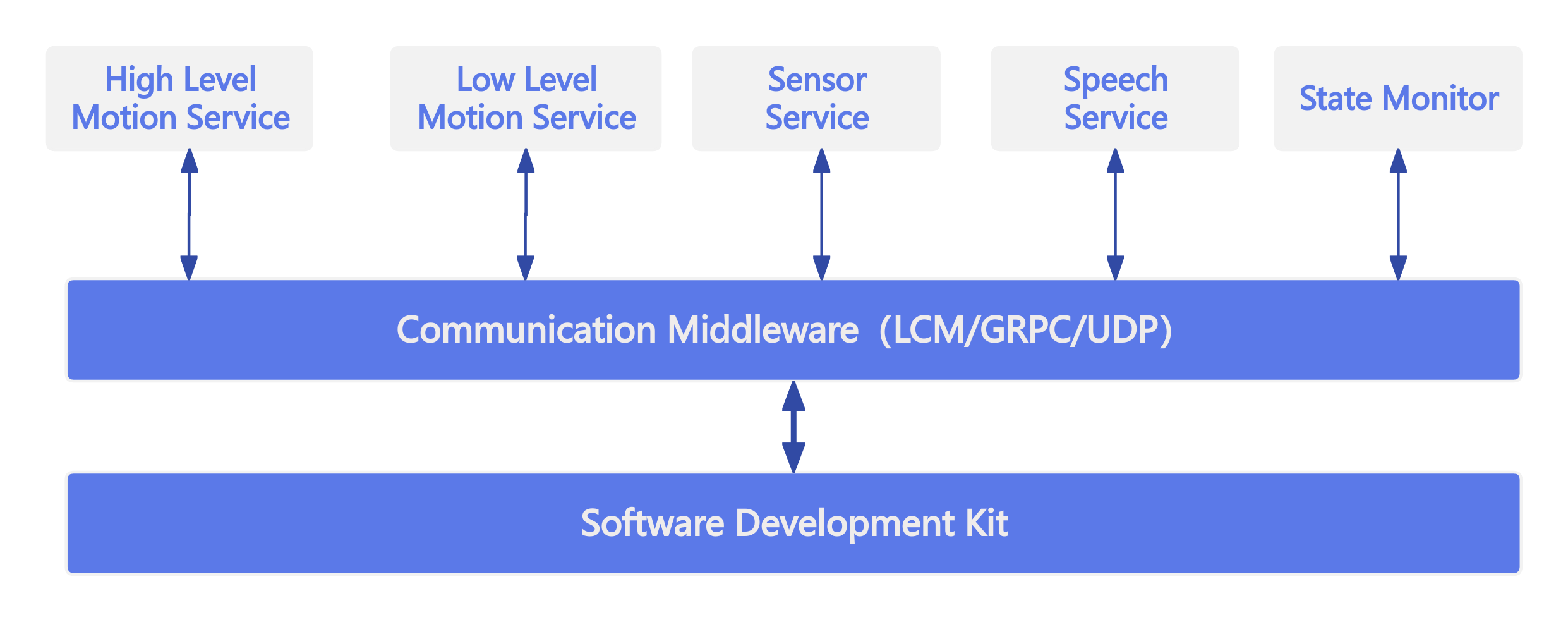
MagicDog provides the following services through message middleware (LCM/GRPC/UDP):
- High-level Motion Control Service
Based on MagicDog's built-in gait controller, this service provides functions such as gait switching, trick execution, posture control, and speed control (equivalent to remote controller operations). The high-level motion control service communicates via GRPC.
- Low-level Motion Control Service
Through the service interface, you can obtain joint status, IMU data, and other information in real time, as well as send joint control commands in real time. The low-level motion control service communicates via LCM.
- Voice Service
Through the service interface, you can control volume, play voice, and obtain raw voice data. The voice service communicates via GRPC, and topic data is transmitted via LCM.
- Sensor Service
Supports data subscription for sensors such as LiDAR, RGBD cameras, and binocular cameras. The sensor service communicates via GRPC/UDP/LCM.
- Status Monitoring Service
Through the service interface, you can subscribe to the robot's hardware and software fault information and BMS battery status. The status monitoring service communicates via GRPC.