OverView
Product SKUs
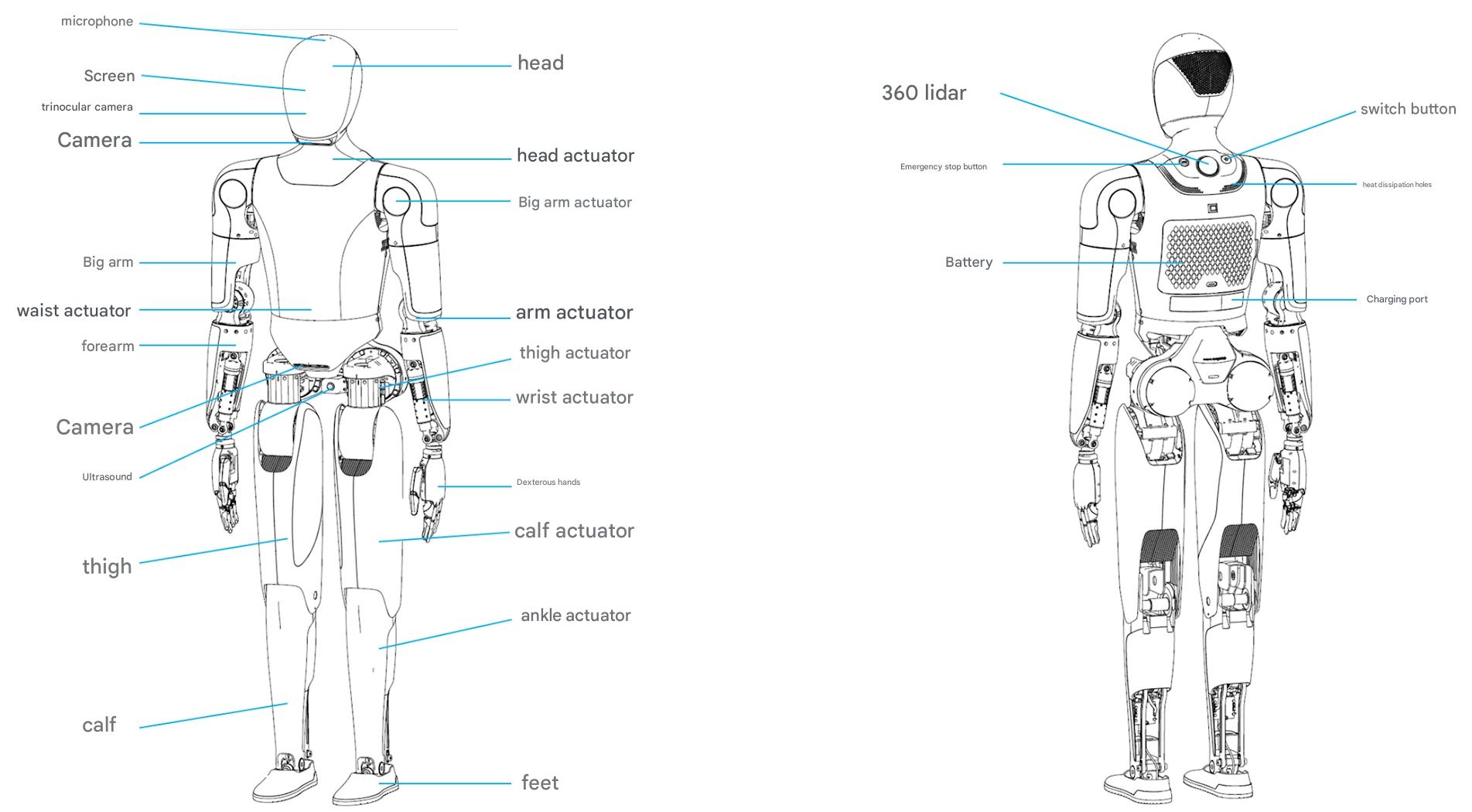
MagicBot-Gen1 is designed to match the size and range of human joint motion. The entire machine is divided into an upper body and a lower body, with multiple degrees of freedom. The arm has 7 degrees of freedom, including shoulder pitch, shoulder roll, shoulder yaw, elbow roll, and dual linear modules. The leg has 6 degrees of freedom, including hip roll, hip yaw, hip pitch, knee pitch, ankle pitch, and ankle roll. The head has 2 degrees of freedom, including a pitch joint and a rotation joint. The waist has 2 degrees of freedom, including a pitch joint and a roll joint. The entire machine (including the dexterous hand) has a total of 42 degrees of freedom (52 degrees of freedom including passive parts), consisting of 42 joint motors, ensuring the robot can achieve highly flexible movement and precise posture control.
The machine's strong human perception system includes vision, hearing, touch, and kinesthetics. Please refer to the actual product for details.
The degrees of freedom of each part of the system are shown in the following table:
| Joint Name | Degrees of Freedom |
|---|---|
| Head | 2 |
| Arm | 7 × 2 |
| Dexterous Hand | 11 × 2 |
| Waist | 2 |
| Leg | 6 × 2 |
| Total | 52 |
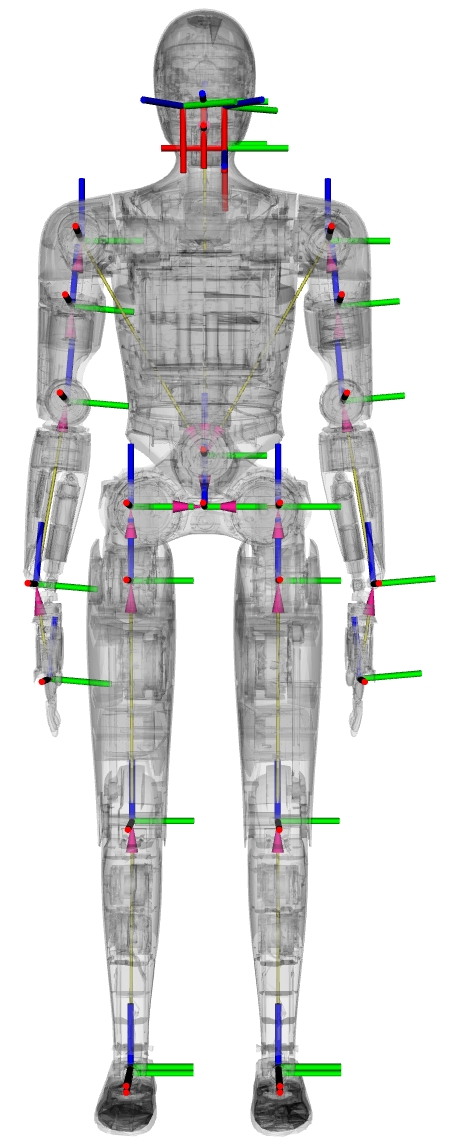
When all joints are at zero degrees, the coordinate systems are as shown in the figure below, where red is the x-axis, green is the y-axis, and blue is the z-axis.

Electrical interface
The MagicBot-Gen1's back is equipped with electrical interfaces for connecting joint motors, sensor peripherals, network ports, and more. This design allows for convenient debugging, troubleshooting, and secondary development. 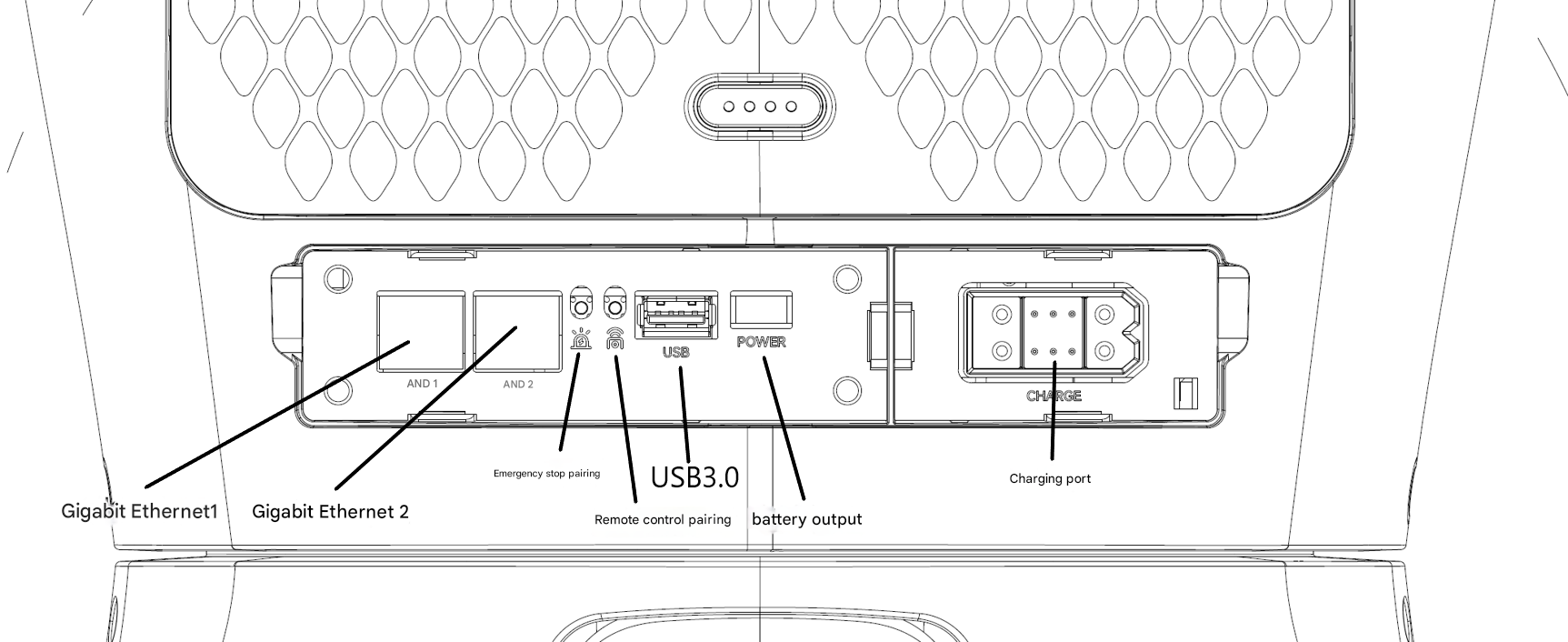
Onboard computer
MagicBot-Gen1 comes standard with one [Operation and Control Computing Unit] and one [Development Computing Unit].
| parameter | Development of computing units |
|---|---|
| model | Jetson Orin NX |
| CPU | Arm® Cortex®-A78AE |
| Number of cores | 8 |
| Number of threads | 8 |
| Maximum turbo frequency | 2GHz |
| Video Memory | 16G |
| Memory | 16G |
| cache | 2MB L2 + 4MB L3 |
| storage | 512G |
| GPU | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores |
| Graphics card maximum dynamic frequency | 918MHz |
| Gaussian and Neural Accelerator | 3.0 |
| instruction set | 64bit |
| OpenGL | 4.6 |
| OpenGL ES | 3.2 |
| Vulkan™ | 1.1 |
| CUDA | 11.4 |
Joint sequence names and joint limits
The specific joints and numbers of the system are as follows:
| Part | Name | Range of Motion |
|---|---|---|
| Head | Head Yaw | ±60° |
| Head Pitch | ±20° | |
| Arm | Shoulder Pitch | ±158° |
| Shoulder Roll | -10~165° | |
| Shoulder Yaw | ±150° | |
| Elbow Roll | -10~127° | |
| Elbow Yaw | ±167° | |
| Wrist Pitch | ±26° | |
| Wrist Roll | -63~49° | |
| Waist | Waist Yaw | ±90° |
| Waist Roll | ±20° | |
| Leg | Hip Roll | -20°~+30° |
| Hip Yaw | -15°~+30° | |
| Hip Pitch | -120°~+40° | |
| Knee Pitch | 0°~+150° | |
| Ankle Pitch | -75°~+30° | |
| Ankle Roll | -20°~+20° |
LiDAR
The MagicBot humanoid robot is equipped with a MIDAS-360 LiDAR on the back of its neck, providing it with exceptional environmental awareness. The LiDAR utilizes omnidirectional, all-angle scanning technology to acquire accurate environmental data in real time. It can quickly identify and measure surrounding objects, providing high-resolution point cloud data.
Depth Camera
The MagicBot humanoid robot is equipped with D435 depth cameras on its chin and hips, providing the robot with excellent visual perception capabilities, enabling it to more accurately perceive and understand its surroundings, achieve precise spatial perception and obstacle detection, and enable the robot to interact with the environment more intelligently and flexibly and respond to various scenarios.
Robot specifications
MagicBot-Gen1
| Project Name | Specifications |
|---|---|
| Height, Width, and Depth (Standing) | 174 × 58 × 28 cm |
| Arm Reach | 160 cm |
| Thigh + Calf | 95 cm |
| Total Weight | Approximately 67.5 kg |
| Battery | Capacity: 25Ah (1.35Kwh), Maximum Voltage: 62.25V |
| Motion Speed | >2 m/s |
| Maximum Dual-Arm Load | 20 kg |
| Peak Torque Density | >194 N·m/kg |
| Maximum Joint Torque | >370 N·m |
| Maximum Slope Angle | >20 degrees |
| Dexterous Hand | 11-DOF Haptic Dexterous Hand (Optional) |
| Single-arm Degrees of Freedom | 7 (3 shoulder joints + 1 elbow joint + 3 wrist joints) |
| Single-leg Degrees of Freedom | 6 (3 hip joints + 1 knee joint + 2 ankle joints) |
| Computing Power Module | High computing power module (standard) |
| Sensor Configuration | 3D LiDAR, depth camera, trinocular camera |
| Audio Module | Ring microphone, speaker |
| Communication Module | 5G module, Bluetooth 5.2, Wi-Fi 6 |
| Reducer | Planetary Reducer, Harmonic Reducer |