Remote control button description
Tutorial Videos
Functional Description
| parameter | Development of computing units |
|---|---|
| Remote control power on | Press and hold for 3 seconds to power on the device without human intervention. |
| Remote control shutdown | Press and hold for 3 seconds to shut down the device without human intervention |
| Charge | USB-C direct fast charging |
| APP pairing | Pairing via mobile app |
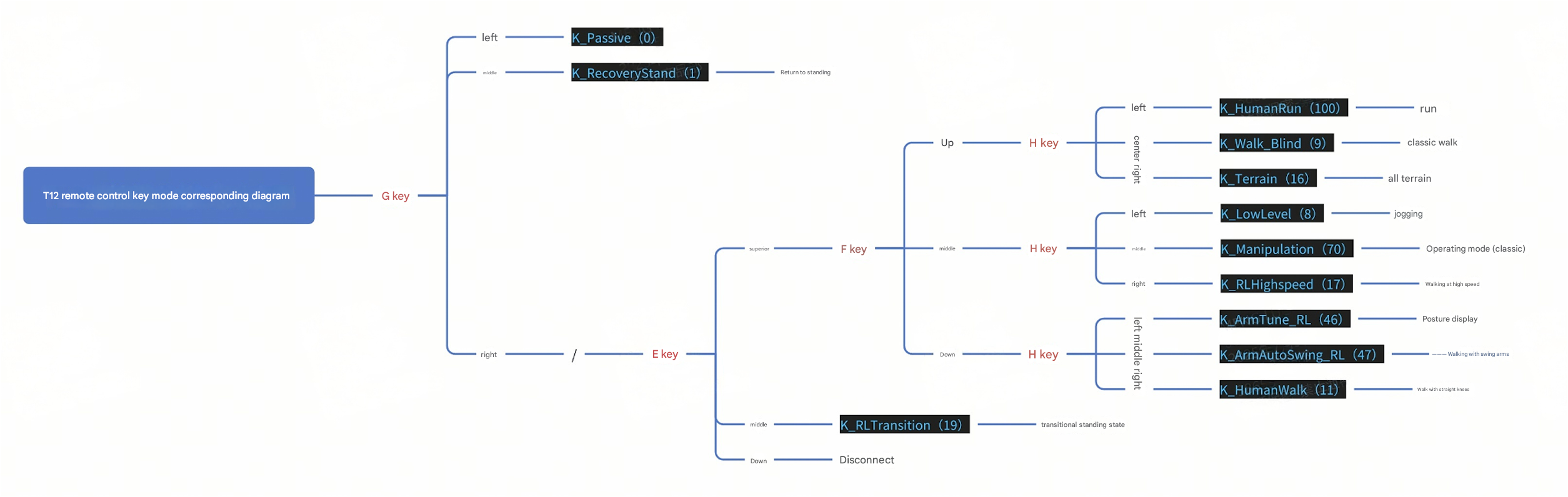
| Robot state switching | Switch between damping, recover stand, and RL modes |
| Robot gait switching | Switch between ArmAutoSwin 47, walking baseline k_lowlevel 8, and ArmTune 46 |
| Robot stunt switching | Switch between opening hand, returning hand, turning around, and turning back |
| Mobile phone and remote control interaction | Supports clamping the phone to the remote control 1. The remote control has higher priority than the APP: if you use the remote control and the APP at the same time, only the remote control will be controlled 2. Supports controlling the robot separately |
| Disassembly and storage | The remote control joystick is detachable and storable |
Mode Switching

Remote control check
Check that the joysticks of the remote controller are in the middle position and whether there are any foreign objects such as sand in the joysticks;
Check whether there is any lag on the buttons of the remote control;
Restore the remote control's levers to their default settings and check if the remote control's batteries are sufficiently charged. The specific steps are as follows:
As shown in the figure, short press and then long press the power button on the remote control to turn on the remote control;
At this time, the indicator light in the center of the lower part of the remote control lights up, indicating the battery status of the remote control from left to right.
When the 1st, 2nd, 3rd and 4th lights are on, the corresponding power levels are 25%, 50%, 75% and 100% respectively;
If you are using the remote control, before turning on the remote control, you need to return the control levers to the initial position: "G" to the far left, "E" to the top, "F" to the bottom, and "H" to the middle.

Remote control on and off
Press the power button briefly and then long press it. When the battery indicator lights up, the device is turned on successfully.
Press the power button briefly and then long press it until the battery indicator light goes out, which means the device has been shut down successfully.
Remote control operation during power on
Short press and long press the power button, after the indicator light turns on, the remote control is turned on successfully;
The robot must be fixed on the protective bracket, and the "G" lever on the remote controller must be moved from the left to the middle;
It is observed that the robot's legs and hands have small joint displacements, and the limbs will slowly enter a standing state.
Control the protective bracket to slowly descend, lower the robot to stand on the ground, and observe whether the robot is standing in balance. If there is no abnormality such as shaking, tilting forward, backward, left, or right, the robot is standing in balance;

Walking mode switch
Make sure the robot is in a standing position and on the ground;
Move the "G" lever on the remote control to the far right, the "H" lever to the middle, and the "F" lever to the bottom to enter the swing arm walking mode. In this mode, the robot has a steady gait.
Move the "G" lever on the remote control to the far right, move the "H" lever to the right, and move the "F" lever to the bottom to enter the anthropomorphic walking mode. In this mode, the robot has a light gait.
Stop and return to standing position
In the swing arm walking mode and anthropomorphic walking mode:
The remote-controlled robot remains stopped;
Move the "G" lever on the remote control to the middle and the robot will enter the standing state.
Note: Do not move the "G" lever on the remote control directly to the center or the far left while walking;
Emergency Stop
In the following emergency situations, you need to immediately move the "G" lever on the remote controller to the far left, which will disable the robot's joints. At this point, the joints will lose power, and the robot will be unable to maintain any posture and will immediately collapse and fall:
The robot emits smoke or a burning smell;
Water or other foreign objects have entered the robot;
The robot is out of control and cannot be stopped by remote control or other means;
The robot is damaged and may cause further danger;
Emergency avoidance, such as working at height or losing control in a dangerous environment;
Sudden changes in the external environment, such as earthquakes, fires, etc.
Note: The robot must be secured to the protective bracket before moving the "G" lever on the remote controller to the far left.
Remote control operation when power off
Make sure to move the "G" lever on the remote control to the middle to put the robot into standing position;
Fix the robot on the bracket and lift it upwards;
Press and hold the power button on the back of the robot (about 6 seconds) until the power status light goes out and the robot is powered off.