Overview
Part Name
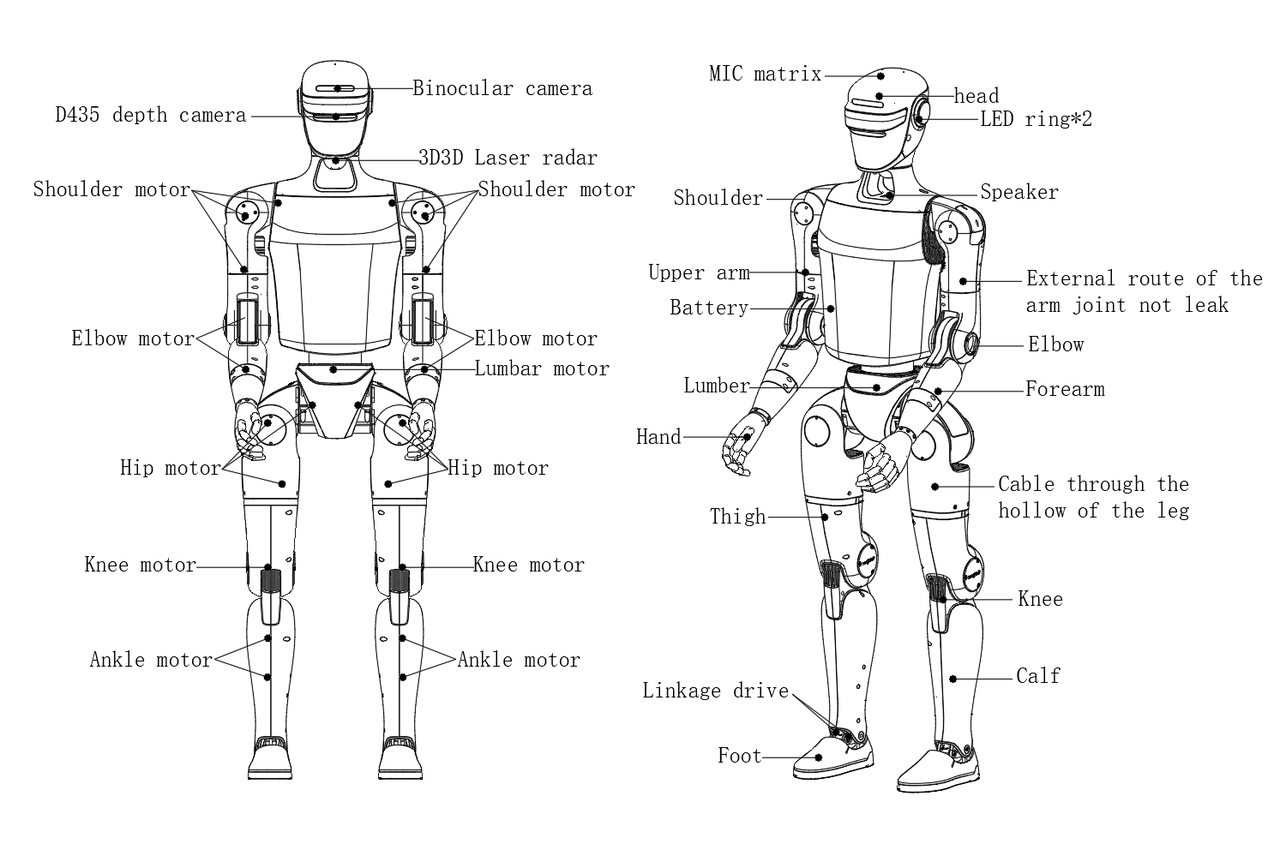
The MagicBot Z1 whole body is divided into upper and , with multiple degrees of freedom. The head has 1 degree of freedom (Yaw). A single arm has 5+ degrees of freedom, including shoulder-body joint, upper arm joint, elbow joint, and wrist joint (optional). A single leg has 6 degrees of freedom, including hip joint, leg joint, hip joint, knee joint, and ankle joint. The waist has 1 degree of freedom (Yaw). Depending on the version, the whole body can be divided into the Z1 basic version with 24 degrees of freedom, and the Z1 development version with an optional 24-50 degrees of freedom. Having multiple joint motor degrees of freedom enables the robot to achieve precise motion and posture control. The MagicBot Z1_24 degrees of freedom humanoid robot body is shown in the figure below, and please refer to the physical product for details.
Dexterous Hand MagicHand S01
| MagicHand S01 Specifications | |
|---|---|
| Structure and Appearance | 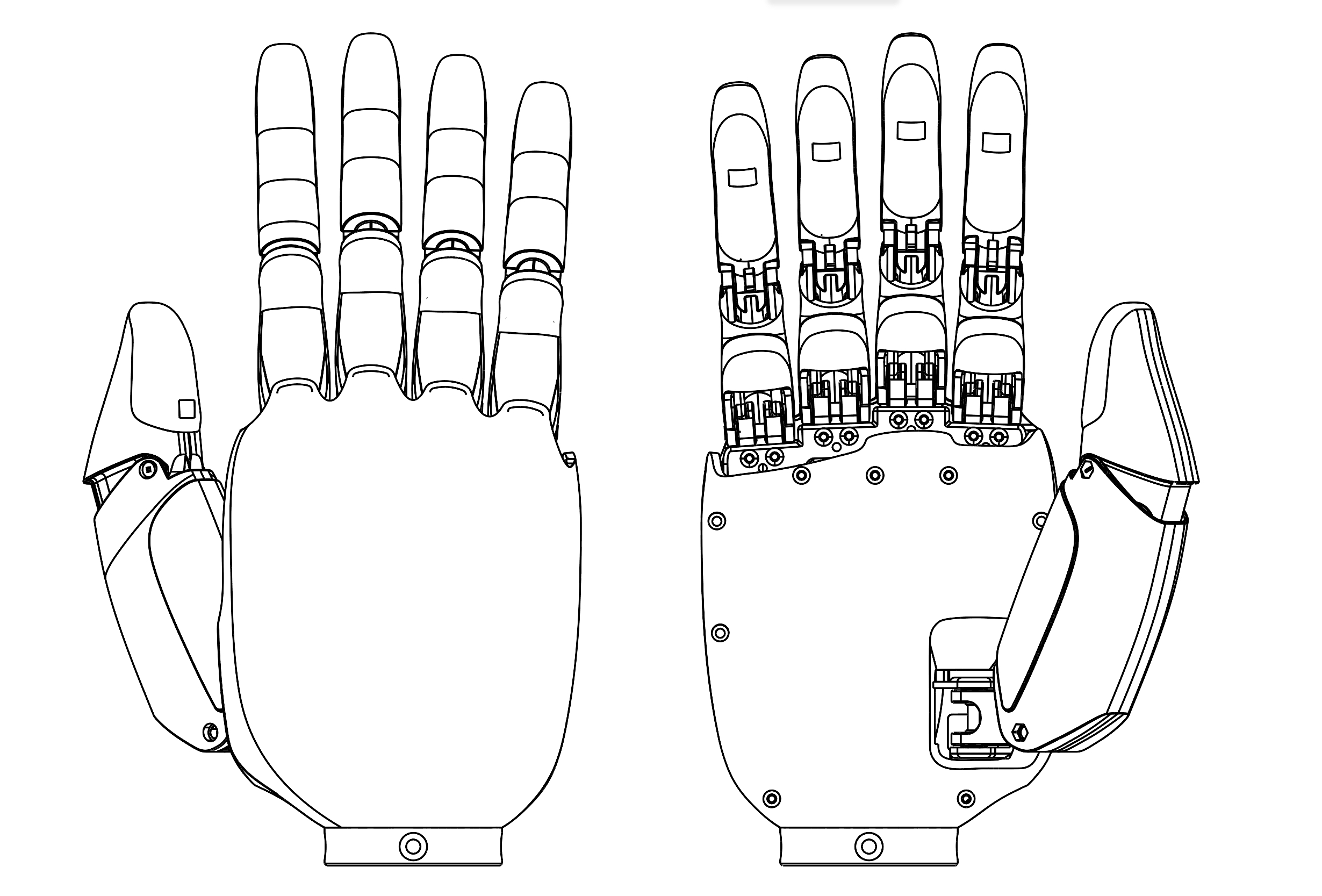 |
| Length, Width, and Depth | 200mm x 87mm x 55mm |
| Weight | ≤650g |
| Rating | 5 |
| Total Degrees of Freedom (Number of Joints) | 11 |
| Active Degrees of Freedom (Number of Motors) | 61, Active Degrees of Freedom for Common Fingers: 22, Active Degrees of Freedom for Thumb: 1 |
| Joint Angles | Common Fingers Flexion: 13° to 203°; Thumb Flexion: -9° to 66.6°; Thumb Lateral Pendulum: 71° to 180°. |
| Drive mode | Coreless motor + reduction gearbox + T-type screw |
| Transmission mode | Connecting rod transmission |
| Actuation options | Pinching, grasping, pressing, lifting, pushing, and other anthropomorphic actions |
| Operating voltage | DC12V |
| Quiescent current | 0.1A @12V |
| Maximum current | 3A@12V |
| Proximity Sensing Solution | ToF |
| Number of Tactile Sensors | 5 |
| Tactile Sensor Dimensions | Normal Force, Tangential Force |
| Tactile Sensor Resolution* | 0.1N |
| Tactile Sensor Range | 0.1-10N |
| Single-Finger Grip Strength* | 2.5kg |
| Four-Finger Grip Strength* | 9.1kg |
| Total Hand Load* | 5kg |
| End-of-Hand Repeatability* | 0.1mm |
| Opening and Closing Time* | 1.2s |
| Thumb Lateral Swing Speed* | 112°/s |
| Thumb Flexion Speed* | 106°/s |
| Four-Finger Flexion Speed* | 150°/s |
| Communication Interface | RS485, EtherCAT |
| SDK Language | C++ |
| Durability Lifespan* | More than 100,000 times |
*Parameters such as single-finger grip strength, four-finger grip strength, and whole-hand load were measured in a laboratory environment.
*The above parameters may vary under different business scenarios and device configurations. Please refer to the actual usage experience.
Electrical Interface
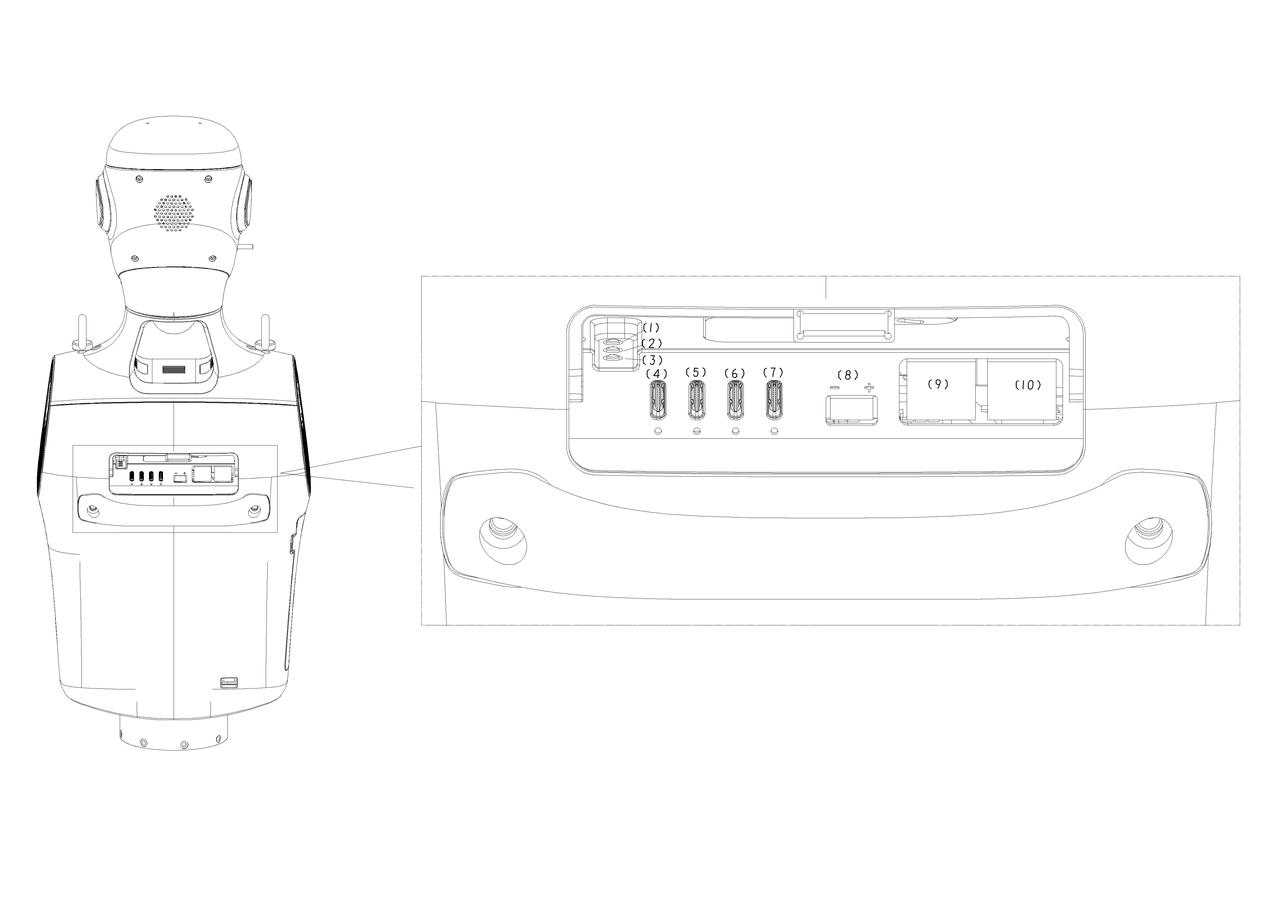
The back of MagicBot Z1 is equipped with electrical interfaces, which are used to connect various body joint motors, sensor peripherals, network ports, etc. This design allows you to conveniently perform debugging, troubleshooting, and secondary development.
| Serial Number | Interface Type | Interface Name | Instructions for Use |
|---|---|---|---|
| 1 | button | Remote control matching | Press and hold this button, the remote control will turn on and start pairing. The buzzer of the remote control will beep to complete the configuration, then release the button. For details, please refer to the user manual of the remote control. |
| 2 | button | Wireless Emergency Stop Matching | Press briefly 3 times to enter pairing mode. Press any key on the remote control to successfully complete the pairing. |
| 3 | button | Bluetooth Network Pairing Button | Press briefly once to enter Bluetooth pairing mode |
| 4 | Type-C | Type-C USB3.0 | Supports USB3.0 Host, with a maximum output of 5V/1.5A |
| 5 | Type-C | Type-C USB3.0 | Supports USB3.0 Host, with a maximum output of 5V/1.5A |
| 6 | Type-C | Type-C USB3.0 | Supports USB3.0 Host, with a maximum output of 5V/1.5A |
| 7 | Type-C | Type-C USB3.0 | Supports USB3.0 Host, with a maximum output of 5V/1.5A |
| 8 | XT30PW-M30.G.Y | VBAT | Directly connected battery output, voltage 54V, current recommended not to exceed 5A. Pay attention to the positive and negative poles |
| 9 | RJ45 | 1000Base-T | Supports 10/100/1000Mbps, supports debugging |
| 10 | RJ45 | 1000Base-T | Supports 10/100/1000Mbps, supports debugging |
Airborne Computer
MagicBot Z1 comes standard with 1 [Motion Control Computing Unit] and 1 [Development Computing Unit] on board.
| Parameter | Develop computing unit |
|---|---|
| Model | Jetson Orin NX |
| CPU | Arm® Cortex®-A78AE |
| Number of Cores | 8 |
| Number of Threads | 8 |
| Max Turbo Frequency | 2GHz |
| Video Memory | 16G |
| Memory | 16G |
| Cache | 2MB L2 + 4MB L3 |
| Storage | 512G |
| GPU | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores |
| Maximum Dynamic Frequency of Graphics Card | 918MHz |
| Gaussian and Neural Accelerator | 3 |
| Instruction Set Architecture | 64bit |
| OpenGL | 4.6 |
| OpenGL ES | 3.2 |
| Vulkan™ | 1.1 |
| CUDA | 11.4 |
【Motion Control Computing Unit】 is dedicated to the magic atom motion control program and is not open to the public. Developers can only use the 【Development Computing Unit】 for secondary development.
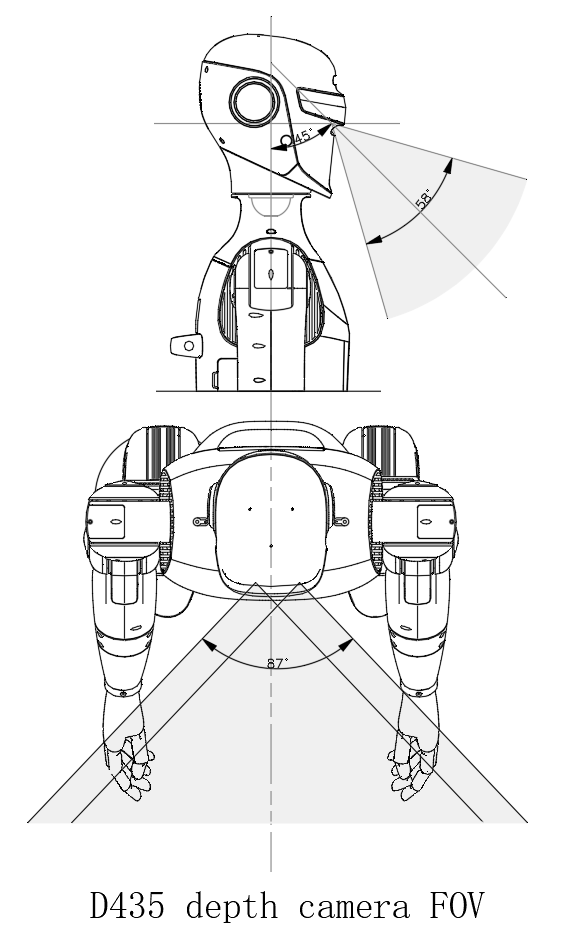
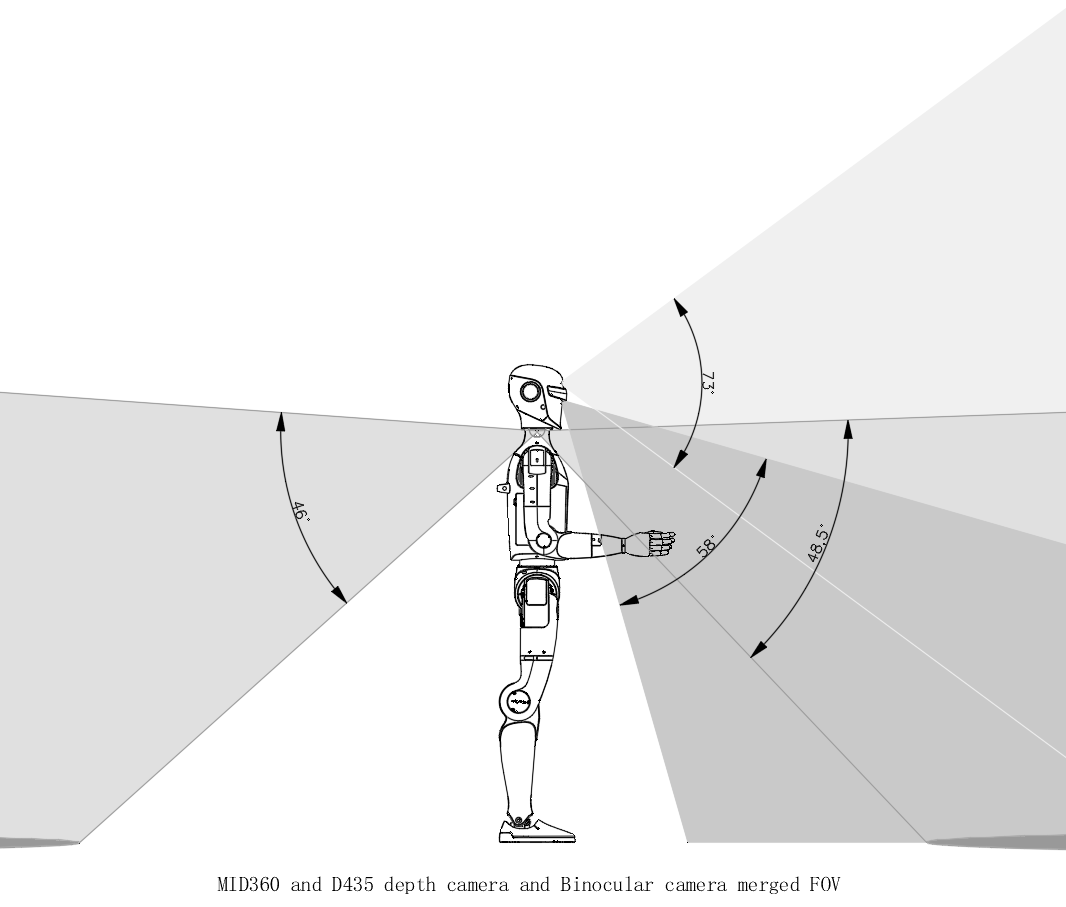
Field of View of Z1 Radar and Camera
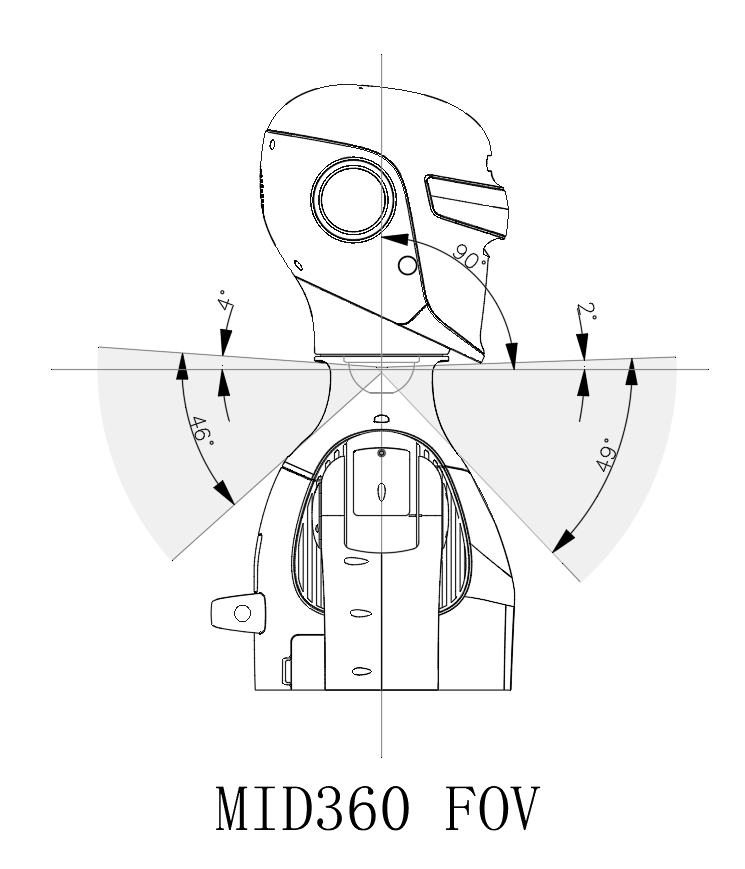
The MagicBot Z1 is equipped with a LIVOX-MID360 lidar on its head, providing the robot with excellent environmental perception capabilities. The lidar uses an all-round, full-angle scanning technology, with a horizontal FOV of up to 360° and a maximum vertical FOV of 49°, enabling it to obtain accurate environmental data in real time. It can quickly identify and measure surrounding objects, providing high-resolution point cloud data.
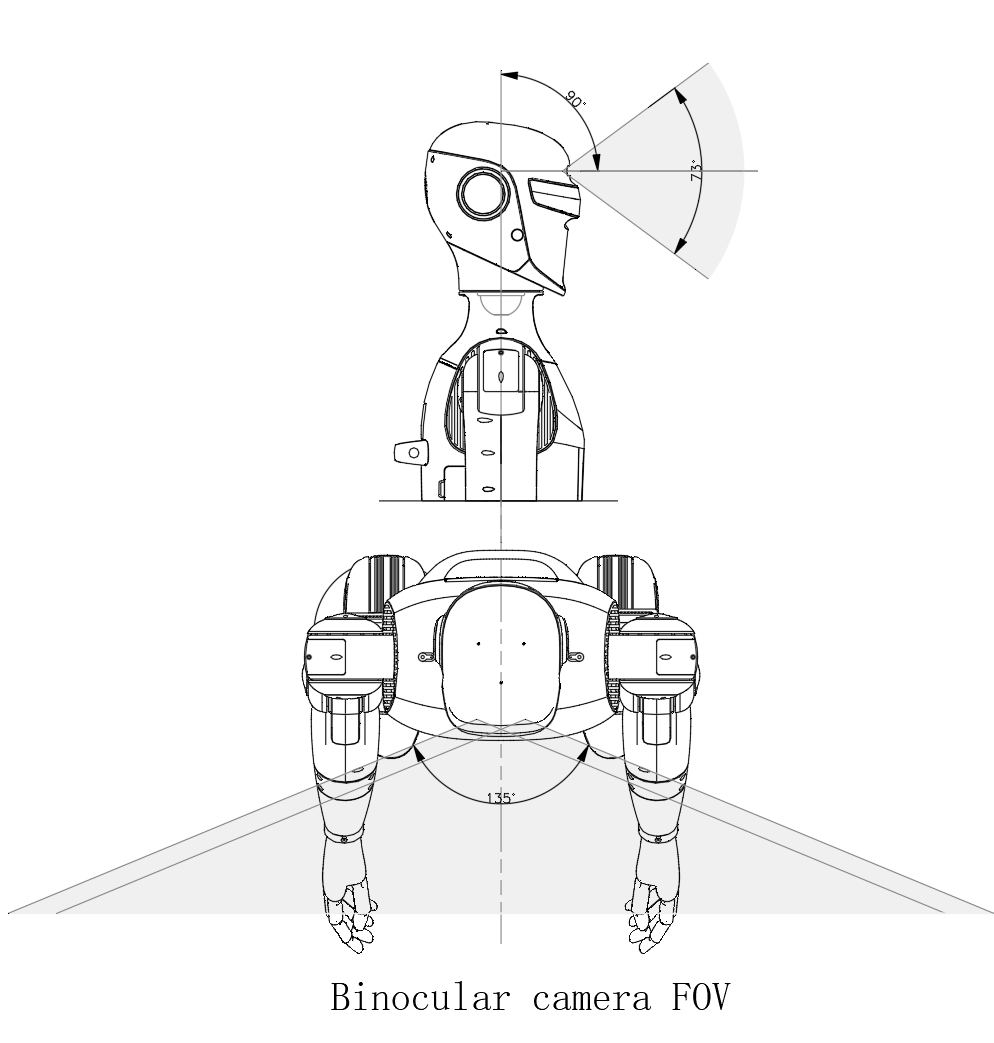
The Z1 head is equipped with a D435i depth camera (FOV horizontal 87°, vertical 58°) and a binocular fisheye camera (FOV horizontal 135°, vertical 75°). This provides the robot with excellent visual perception capabilities, enabling it to more accurately perceive and understand the surrounding environment, achieve precise spatial perception and obstacle detection, and allowing the robot to interact with the environment more intelligently and flexibly and handle various scenarios.
Joint Motor
The joints of MagicBot Z1 are equipped with Magic Atom's full stack self-developed motors, which have excellent performance and features. The maximum torque of the motor is 130 N.m, and the motor structure is lightweight and compact. The motor is also equipped with dual encoders, providing more accurate position and speed feedback to meet the requirements of high-precision control. Joint sequence names and joint limits
| Joint number | Joint name | Limit (radians) |
|---|---|---|
| 1 | JOINT_HIP_PITCH_L | -2.7925~2.7925 |
| 2 | JOINT_HIP_ROLL_L | -0.524~2.967 |
| 3 | JOINT_HIP_YAW_L | -2.7925~2.7925 |
| 4 | JOINT_KNEE_PITCH_L | 0~2.653 |
| 5 | JOINT_ANKLE_PITCH_L | -0.83~0.524 |
| 6 | JOINT_ANKLE_ROLL_L | -0.262~0.262 |
| 7 | JOINT_HIP_PITCH_R | -2.7925~2.7925 |
| 8 | JOINT_HIP_ROLL_R | -2.967~0.524 |
| 9 | JOINT_HIP_YAW_R | -2.7925~2.7925 |
| 10 | JOINT_KNEE_PITCH_R | 0~2.653 |
| 11 | JOINT_ANKLE_PITCH_R | -0.83~0.524 |
| 12 | JOINT_ANKLE_ROLL_R | -0.262~0.262 |
| 13 | joint_la1 | -2.88~2.88 |
| 14 | joint_la2 | -0.175~2.2515 |
| 15 | joint_la3 | -2.618~2.618 |
| 16 | joint_la4 | -0.96~1.70 |
| 17 | joint_la5 | -2.618~2.618 |
| 18 | joint_ra1 | -2.88~2.88 |
| 19 | joint_ra2 | -2.2515~0.175 |
| 20 | joint_ra3 | -2.618~2.618 |
| 21 | joint_ra4 | -0.96~1.70 |
| 22 | joint_ra5 | -2.618~2.618 |
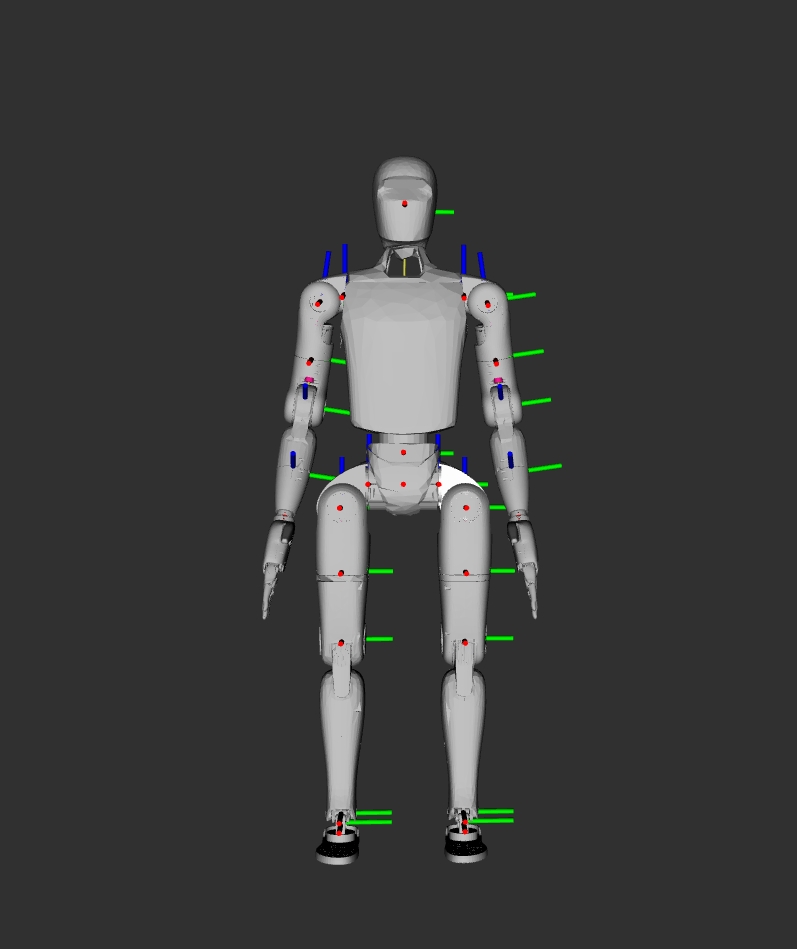
Degree of Freedom Configuration, Coordinate System, Joint Rotation Axis, and Joint Zero Point
When all joints are at zero degrees, the coordinate systems are as shown in the figure below. Red represents the x-axis, green represents the y-axis, and blue represents the z-axis.
Specification Parameters
| Category | Specifications | Z1 | Z1 Development Edition |
|---|---|---|---|
| Mechanical Parameters | Height, Width, and Depth (Standing) | 1369*422*200mm | 1369*422*200mm |
| Height, Width, and Depth (Folded) | 730*422*395mm | 730*422*395mm | |
| Weight with battery | Approximately 40kg | Approximately 40kg+ | |
| Total degrees of freedom (number of joints) | 24 | 24 - 50 | |
| Single-leg degrees of freedom | 6 | 6 | |
| Head degrees of freedom | 1 | 1 | |
| Waist degrees of freedom | 1 | 1 | |
| Single Arm DOF | 5 | 5+ (2 wrist DOF optional) | |
| Dexterous Hand DOF | / | Optional 11-DOF Haptic Dexterous Hand | |
| Joint Output Bearing | Industrial-grade high-rigidity roller bearing (can withstand 8.7 kN impact force) | Industrial-grade high-rigidity roller bearing (can withstand 8.7 kN impact force) | |
| Joint Motor | Low-inertia, high-speed, high-overload permanent magnet synchronous motor (control frequency 25kHz, high burst force, improved heat dissipation)> | Low inertia, high speed, high overload permanent magnet synchronous motor (control frequency 25kHz, high burst force, improved heat dissipation) | |
| Maximum knee torque* | 100N.m | 130N.m | |
| Maximum arm load* | 2kg | 3kg | |
| Calf + thigh length | 0.6m | 0.6m | |
| Arm span | Approximately 0.5m | Approximately 0.5m | |
| Head Z-axis joint range of motion | ±40° | ±40° | |
| Waist Z-axis joint range of motion | ±160° | ±160°> | |
| Knee joint range of motion | 0-152°, | 0-152°, | |
| Hip joint range of motion | P ±160°, R -30-+110°, Y ±160° | P ±160°, R -30~+110°, Y ±160° | |
| Electrical Characteristics | Joint Encoder | Dual Encoder | Dual Encoder |
| Cooling System | Intelligent Air Cooling | Intelligent Air Cooling | |
| Power Supply | 15-cell Battery | 15-cell Battery | |
| Basic Computing Power | 8-core High-Performance CPU | 8-core High-Performance CPU | |
| Perception Sensors: | 3D LiDAR + Depth Camera + Binocular Fisheye Camera + Head Tactile Sensor | 3D LiDAR + Depth Camera + Binocular Fisheye Camera + Head Tactile Sensor | |
| WiFi6, Bluetooth 5.2 | Yes | Yes | |
| Microphone Array | Yes | Yes | |
| 5W Speaker | Yes | Yes | |
| Supporting Equipment | High Computing Power Module | No | NVIDIA Jetson Orin |
| Smart Battery (Quick Release) | 10000mAh | 10000mAh | |
| Charger | 62V 5A | 62V 5A | |
| Handheld Remote Control | Yes | Yes | |
| Other | Battery Life* | Approximately 2 hours | Approximately 2 hours |
| OTA Upgrade | Supported | Supported | |
| Secondary Development | No | Yes |
*Maximum torque, maximum arm load, endurance time, etc. are measured under laboratory conditions.
*The above parameters may vary under different business scenarios and device configurations. Please refer to the actual usage experience.