Low-Level Motion Control Service
Provides robot system low-level motion control service. Through the
LowLevelMotionController, you can control robot joints and obtain status via topic communication.
Interface Definition
LowLevelMotionController is a motion controller for low-level development, supporting direct control and state subscription of motion components such as arms, legs, head, waist, hands, etc., as well as body IMU data acquisition.
LowLevelMotionController
| Item | Content |
|---|---|
| Class Name | LowLevelMotionController |
| Constructor | controller = LowLevelMotionController() |
| Function Overview | Constructor, initializes low-level controller object. |
| Notes | Constructs internal resources. |
initialize
| Item | Content |
|---|---|
| Function Name | initialize |
| Function Declaration | bool initialize() |
| Function Overview | Initialize controller, establish low-level connection. |
| Return Value | True indicates success, False indicates failure. |
| Notes | Must be initialized on first call. |
shutdown
| Item | Content |
|---|---|
| Function Name | shutdown |
| Function Declaration | void shutdown() |
| Function Overview | Shutdown controller, release low-level resources. |
| Notes | Used in conjunction with initialize. |
set_period_ms
| Item | Content |
|---|---|
| Function Name | set_period_ms |
| Function Declaration | void set_period_ms(int period_ms) |
| Function Overview | Set control period time (milliseconds). |
| Parameter Description | period_ms: Period time, unit is milliseconds. |
| Notes | Non-blocking interface, period parameter used internally by controller, controls joint command sending frequency. |
subscribe_arm_state
| Item | Content |
|---|---|
| Function Name | subscribe_arm_state |
| Function Declaration | void subscribe_arm_state(callback) |
| Function Overview | Subscribe to arm joint state data |
| Parameter Description | callback: Data processing function, signature is callback(data: JointState) -> None |
| Notes | Non-blocking interface. |
publish_arm_command
| Item | Content |
|---|---|
| Function Name | publish_arm_command |
| Function Declaration | Status publish_arm_command(JointCommand command) |
| Function Overview | Publish arm control commands |
| Parameter Description | command: Target position/velocity, etc. |
| Return Value | Status object, Status.code == ErrorCode.OK indicates success. |
| Notes | Non-blocking interface. |
subscribe_leg_state
| Item | Content |
|---|---|
| Function Name | subscribe_leg_state |
| Function Declaration | void subscribe_leg_state(callback) |
| Function Overview | Subscribe to leg joint state data |
| Parameter Description | callback: Data processing function, signature is callback(data: JointState) -> None |
| Notes | Non-blocking interface. |
publish_leg_command
| Item | Content |
|---|---|
| Function Name | publish_leg_command |
| Function Declaration | Status publish_leg_command(JointCommand command) |
| Function Overview | Publish leg control commands |
| Parameter Description | command: Target position/velocity, etc. |
| Return Value | Status object, Status.code == ErrorCode.OK indicates success. |
| Notes | Non-blocking interface, called when publishing or subscribing. |
subscribe_head_state
| Item | Content |
|---|---|
| Function Name | subscribe_head_state |
| Function Declaration | void subscribe_head_state(callback) |
| Function Overview | Subscribe to head joint state data |
| Parameter Description | callback: Data processing function, signature is callback(data: JointState) -> None |
| Notes | Non-blocking interface. |
publish_head_command
| Item | Content |
|---|---|
| Function Name | publish_head_command |
| Function Declaration | Status publish_head_command(JointCommand command) |
| Function Overview | Publish head control commands |
| Parameter Description | command: Target position/velocity, etc. |
| Return Value | Status object, Status.code == ErrorCode.OK indicates success. |
| Notes | Non-blocking interface. |
subscribe_waist_state
| Item | Content |
|---|---|
| Function Name | subscribe_waist_state |
| Function Declaration | void subscribe_waist_state(callback) |
| Function Overview | Subscribe to waist joint state data |
| Parameter Description | callback: Data processing function, signature is callback(data: JointState) -> None |
| Notes | Non-blocking interface. |
publish_waist_command
| Item | Content |
|---|---|
| Function Name | publish_waist_command |
| Function Declaration | Status publish_waist_command(JointCommand command) |
| Function Overview | Publish waist control commands |
| Parameter Description | command: Target position/velocity, etc. |
| Return Value | Status object, Status.code == ErrorCode.OK indicates success. |
| Notes | Non-blocking interface. |
subscribe_hand_state
| Item | Content |
|---|---|
| Function Name | subscribe_hand_state |
| Function Declaration | void subscribe_hand_state(callback) |
| Function Overview | Subscribe to hand state data |
| Parameter Description | callback: Data processing function, signature is callback(data: HandState) -> None |
| Notes | Non-blocking interface. |
publish_hand_command
| Item | Content |
|---|---|
| Function Name | publish_hand_command |
| Function Declaration | Status publish_hand_command(HandCommand command) |
| Function Overview | Publish hand control commands |
| Parameter Description | command: Hand joint target positions, etc. |
| Return Value | Status object, Status.code == ErrorCode.OK indicates success. |
| Notes | Non-blocking interface. |
subscribe_body_imu
| Item | Content |
|---|---|
| Function Name | subscribe_body_imu |
| Function Declaration | void subscribe_body_imu(callback) |
| Function Overview | Subscribe to body IMU data |
| Parameter Description | callback: IMU data processing function, signature is callback(data: Imu) -> None |
| Notes | Non-blocking interface. |
Type Definitions
SingleHandJointCommand — Single Hand Joint Control Command
| Field Name | Type | Description |
|---|---|---|
operation_mode | int16_t | Control mode (such as position, torque, impedance, etc.), default value is 0 |
pos | list[float] | Desired position array (7 degrees of freedom) |
HandCommand — Complete Hand Control Command
| Field Name | Type | Description |
|---|---|---|
timestamp | int64_t | Timestamp (unit: nanoseconds) |
cmd | list[SingleHandJointCommand] | Control command array, left hand and right hand in order |
SingleHandJointState — Single Hand Joint State
| Field Name | Type | Description |
|---|---|---|
status_word | int16_t | Status |
pos | list[float] | Actual position (unit depends on controller definition) |
toq | list[float] | Actual torque (unit: Nm) |
cur | list[float] | Actual current (unit: A) |
error_code | int16_t | Error code (0 indicates normal) |
HandState — Complete Hand Status Information
| Field Name | Type | Description |
|---|---|---|
timestamp | int64_t | Timestamp (unit: nanoseconds) |
state | list[SingleHandJointState] | All hand joint states (total two), left hand and right hand in order |
SingleJointCommand — Single Joint Control Command
| Field Name | Type | Description |
|---|---|---|
operation_mode | int16_t | Operation mode (such as position control, velocity control, torque control, etc.), default value is 200 |
pos | float | Target position (unit: rad or m, depends on joint type) |
vel | float | Target velocity (unit: rad/s or m/s) |
toq | float | Target torque (unit: Nm) |
kp | float | Position loop control gain (proportional term) |
kd | float | Velocity loop control gain (derivative term) |
JointCommand — Joint Control Command
| Field Name | Type | Description |
|---|---|---|
timestamp | int64_t | Timestamp (unit: nanoseconds) |
joints | list[SingleJointCommand] | Joint control command array |
SingleJointState — Single Joint Status
| Field Name | Type | Description |
|---|---|---|
status_word | int16_t | Current joint status (custom state machine encoding) |
posH | float | Actual position (high encoder reading, may be redundant encoder) |
posL | float | Actual position (low encoder reading) |
vel | float | Current velocity (unit: rad/s or m/s) |
toq | float | Current torque (unit: Nm) |
current | float | Current current (unit: A) |
err_code | int16_t | Error code (such as encoder exception, motor overcurrent, etc.) |
JointState — Joint State
| Field Name | Type | Description |
|---|---|---|
timestamp | int64_t | Timestamp (unit: nanoseconds) |
joints | list[SingleJointState] | Joint state array |
Joint Motor Order
Head Joints
| Index | Joint Name |
|---|---|
| 0 | joint_hy |
Upper Arm Joints
| Index | Joint Name |
|---|---|
| 0 | joint_la1 |
| 1 | joint_la2 |
| 2 | joint_la3 |
| 3 | joint_la4 |
| 4 | joint_la5 |
| 5 | joint_la6 |
| 6 | joint_ra7 |
| 7 | joint_ra1 |
| 8 | joint_ra2 |
| 9 | joint_ra3 |
| 10 | joint_ra4 |
| 11 | joint_ra5 |
| 12 | joint_ra6 |
| 13 | joint_ra7 |
Waist Joints
| Index | Joint Name |
|---|---|
| 0 | joint_wy |
Leg Joints
| Index | Joint Name |
|---|---|
| 0 | left hip roll |
| 1 | left hip yaw |
| 2 | left hip pitch |
| 3 | left knee pitch |
| 4 | left ankle pitch |
| 5 | left ankle roll |
| 6 | right hip roll |
| 7 | right hip yaw |
| 8 | right hip pitch |
| 9 | right knee pitch |
| 10 | right ankle pitch |
| 11 | right ankle roll |
URDF Reference
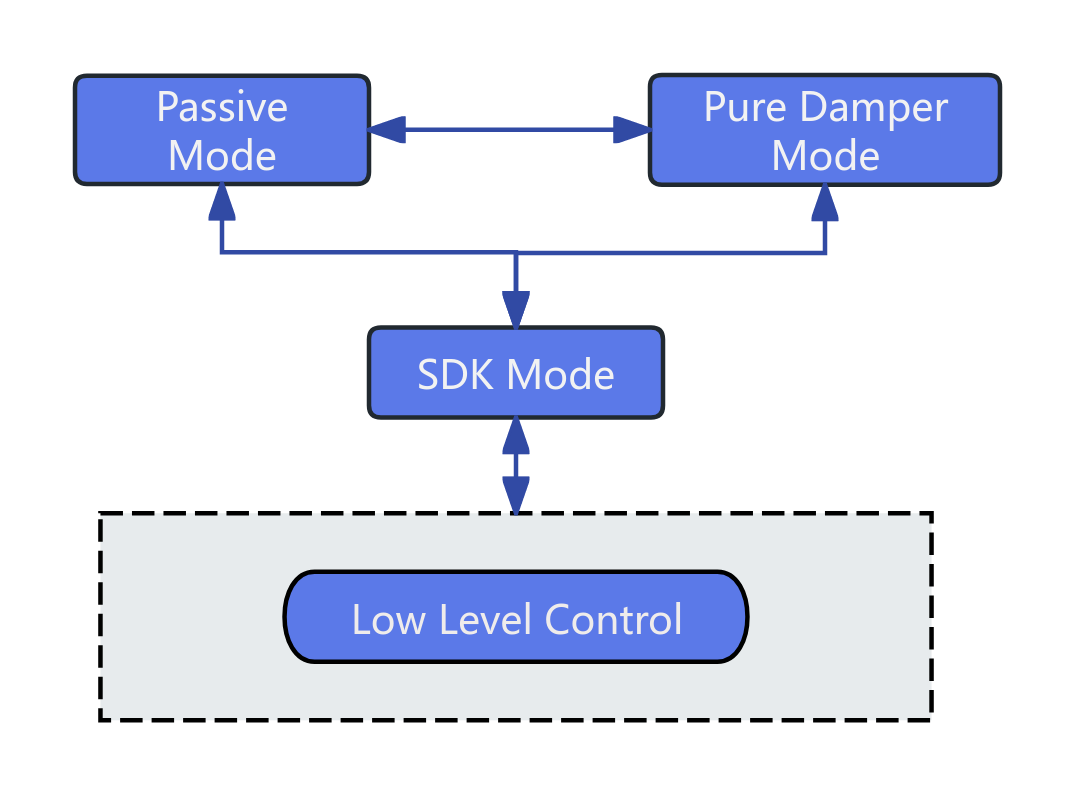
Low-Level Motion Control Robot State Introduction
Robot low-level motion mainly develops three-loop control of joints for developers to perform secondary development of robot motion capabilities. Basic control state switching mechanism: