Service Introduction
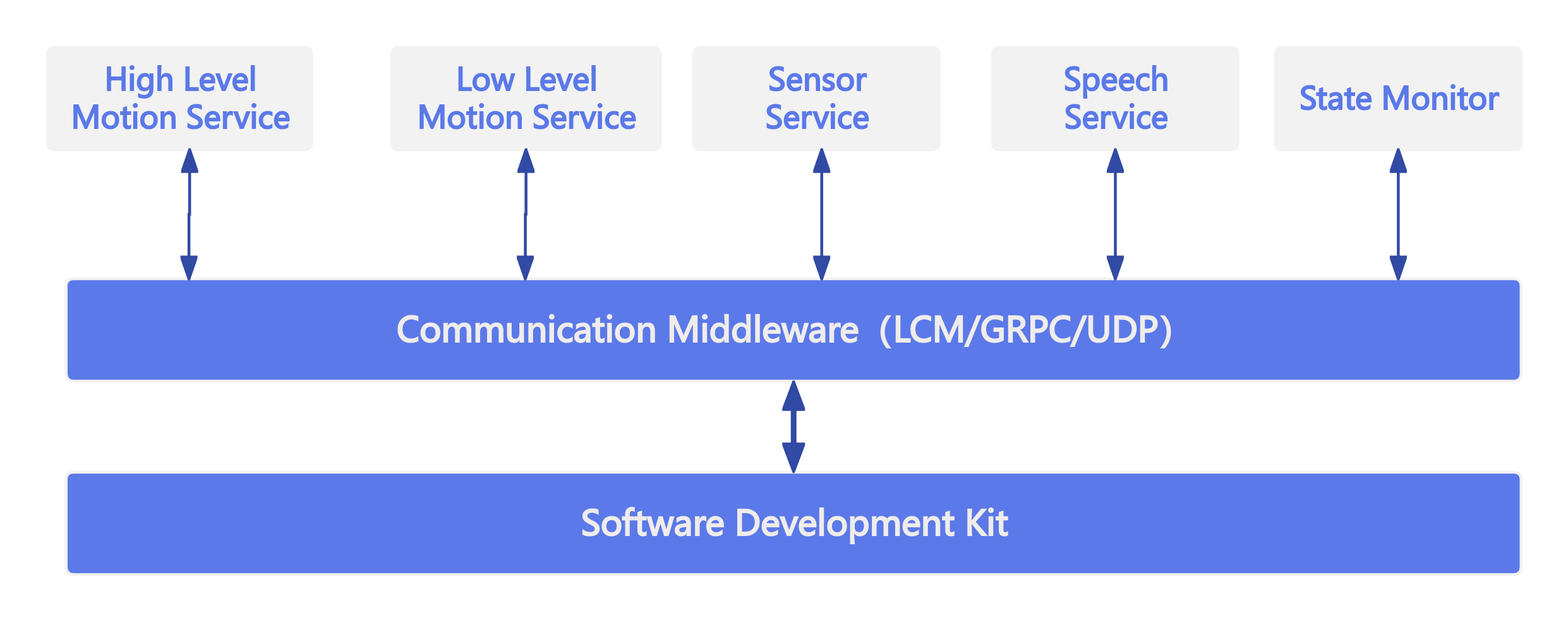
Magicbot Z1 provides the following services through message middleware (LCM/GRPC/UDP):
- High-Level Motion Control Service
Based on Z1's built-in gait controller, it can perform gait switching, trick execution, attitude and velocity control (equivalent to remote control) and other functions. High-level motion control service uses GRPC for communication.
- Low-Level Motion Control Service
Through service interfaces, joint and IMU data can be obtained in real-time, and joint commands can be sent in real-time to control motors. Low-level motion control service uses LCM for communication.
- Audio Service
Through service interfaces, volume and voice control can be managed. Audio service uses GRPC/LCM for communication.
- Sensor Service
Supports data subscription for lidar, RGBD, binocular camera and other sensors. Sensor service uses GRPC/UDP/LCM for communication.
Notice: Current version only supports lidar data subscription, RGBD/binocular camera data is not yet supported
- Status Monitoring Service
Through service interfaces, robot body software/hardware faults and BMS status can be subscribed to. Status monitoring service uses GRPC for communication.