概述
产品SKU
MagicBot-Gen1对标人类关节尺寸及关节运动范围,整机分为上半身和下半身,具备多个自由度。单手臂拥有 7 个自由度,包括肩关节俯仰、肩关节横滚、肩关节偏航、肘关节横滚及双直线模组。单腿拥有 6 个自由度,包括髋关节横滚、髋关节偏航、髋关节俯仰、膝关节俯仰、踝关节俯仰和踝关节横滚。头部具备 2 个自由度,包括俯仰关节和旋转关节。腰部具备 2 个自由度,包括俯仰关节和横滚关节。整机(含灵巧手)共有 42 个自由度(计入被动则为52个自由度),由 42 个关节电机组成,确保机器人能够实现高灵活性的运动和精准的姿态控制。
机器强对标人感知系统,包括视觉、听觉、触觉和动觉。具体请以实物为准。

系统各个部位的自由度如下表所示:
| 关节名称 | 自由度 |
|---|---|
| 头部 | 2 |
| 手臂 | 7 × 2 |
| 灵巧手 | 11 × 2 |
| 腰部 | 2 |
| 腿 | 6 × 2 |
| 合计 | 52 |
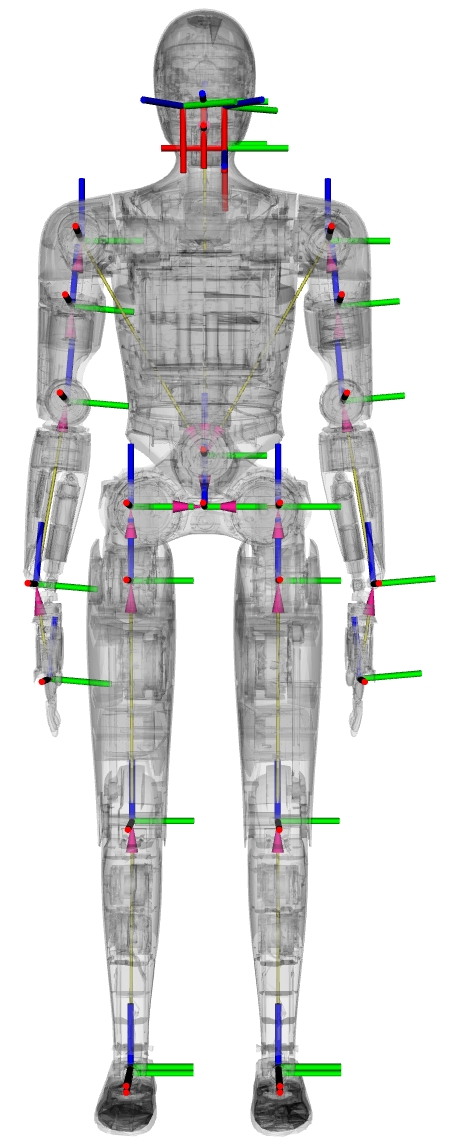
当各个关节均为零度时,各坐标系如下图所示。其中红色为x轴,绿色为y轴,蓝色为z轴。

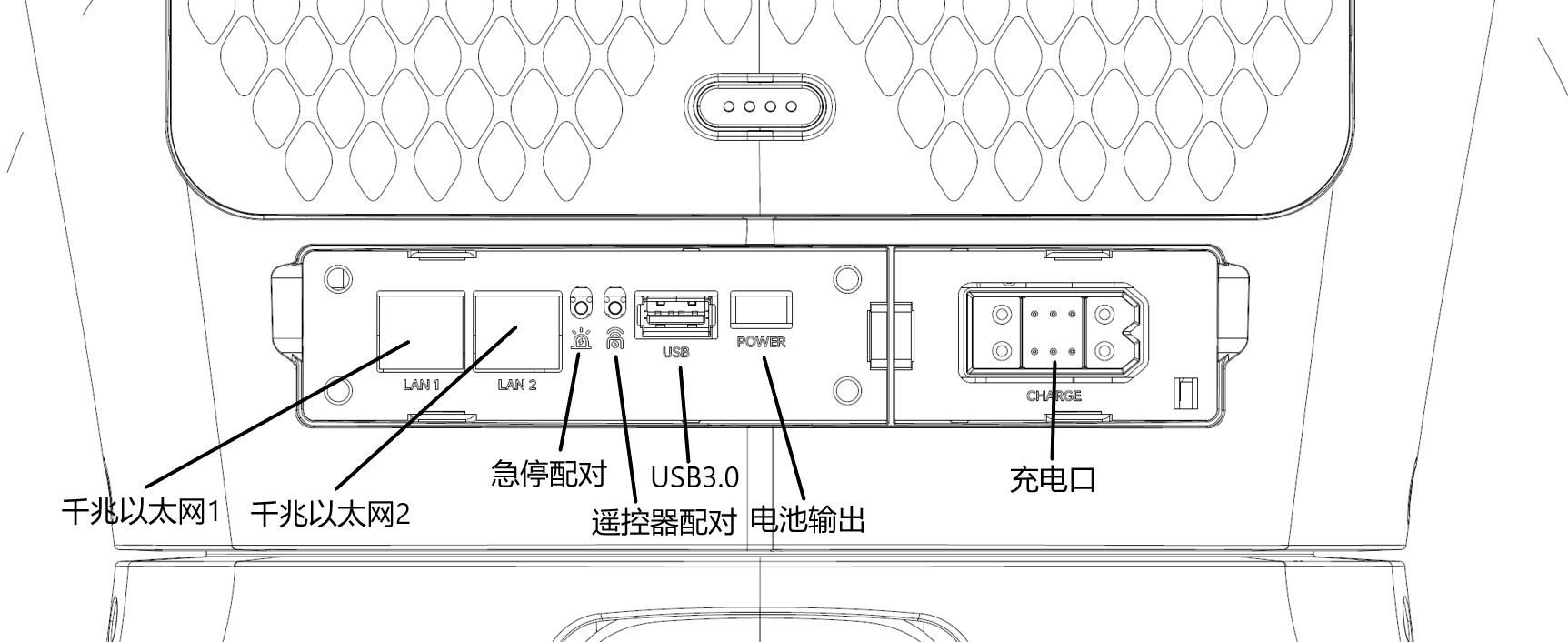
电气接口
MagicBot-Gen1的后腰配备了电气接口,这些接口用于连接各个机身关节电机、传感器外设、网口等。这样的设计使您能够方便地进行调试、排查问题以及进行二次开发。
机载计算机
MagicBot-Gen1 机载标配 1 块【运控计算单元】,并且标配一块【开发计算单元】。
| 参数 | 开发计算单元 |
|---|---|
| 型号 | Jetson Orin NX |
| CPU | Arm® Cortex®-A78AE |
| 内核数 | 8 |
| 线程数 | 8 |
| 最大睿频频率 | 2GHz |
| 显存 | 16G |
| 内存 | 16G |
| 缓存 | 2MB L2 + 4MB L3 |
| 存储 | 512G |
| GPU | 搭载 32 个 Tensor Core 的 1024 核 NVIDIA Ampere 架构 GPU |
| 显卡最大动态频率 | 918MHz |
| 高斯和神经加速器 | 3.0 |
| 指令集 | 64bit |
| OpenGL | 4.6 |
| OpenGL ES | 3.2 |
| Vulkan™ | 1.1 |
| CUDA | 11.4 |
关节顺序名称与关节限位
系统的具体关节及编号如下:
| 所属部位 | 名称 | 运动范围 |
|---|---|---|
| 头部 | 头关节周转 Head Yaw | ±60° |
| 头关节俯仰 Head Pitch | ±20° | |
| 手臂 | 肩关节俯仰 Shoulder Pitch | ±158° |
| 肩关节侧展 Shoulder Roll | -10~165° | |
| 肩关节周转 Shoulder Yaw | ±150° | |
| 肘关节侧展 Elbow Roll | -10~127° | |
| 肘关节周转 Elbow Yaw | ±167° | |
| 腕关节俯仰 Wrist Pitch | ±26° | |
| 腕关节侧展 Wrist Roll | -63~49° | |
| 腰部 | 腰关节转动 Waist Yaw | ±90° |
| 腰关节侧摆 Waist Roll | ±20° | |
| 腿部 | 髋关节侧展 Hip Roll | -20~+30° |
| 髋关节周转 Hip Yaw | -15°~+30° | |
| 髋关节俯仰 Hip Pitch | -120°~+40° | |
| 膝关节俯仰 Knee Pitch | 0°~+150° | |
| 踝关节俯仰 Ankle Pitch | -75°~+30° | |
| 踝关节侧展 Ankle Roll | -20°~+20° |
激光雷达
MagicBot人形机器人后颈部搭载了 MIDAS-360 激光雷达,为机器人提供了卓越的环境感知能力。激光雷达采用全方位、全角度的扫描技术,能够实时获取精准的环境数据。它能够快速识别和测量周围的物体,提供高分辨率的点云数据。
深度相机
MagicBot人形机器人下巴和胯部搭载 D435 深度相机,为机器人提供了卓越的视觉感知能力,能够更准确地感知和理解周围环境,实现精确的空间感知和障碍物检测,使机器人能够更智能、灵活地与环境进行交互和应对各种场景。
机器人规格
MagicBot-Gen1
| 项目名称 | 规格参数 |
|---|---|
| 高宽厚(站立) | 174 × 58 × 28 cm |
| 双臂臂展 | 160 cm |
| 大腿 + 小腿 | 95 cm |
| 整机重量 | 约 67.5 kg |
| 电池 | 容量 25Ah(1.35Kwh),最大电压 62.25V |
| 运动速度 | >2 m/s |
| 双臂最高搬运负载 | 20 Kg |
| 峰值扭矩密度 | >194 N·m/kg |
| 最大关节扭矩 | >370 N·m |
| 最大斜坡角度 | >20 度 |
| 灵巧手 | 11 自由度触觉灵巧手(选配) |
| 单手臂自由度 | 7(肩关节×3 + 肘关节×1 + 腕关节×3) |
| 单腿自由度 | 6(髋关节×3 + 膝关节×1 + 踝关节×2) |
| 算力模块 | 高算力模组(标配) |
| 传感器配置 | 3D 激光雷达、深度相机、三目相机 |
| 音频模块 | 环形麦克风、扬声器 |
| 通讯模块 | 5G 模组、Bluetooth 5.2、WIFI6 |
| 减速器 | 行星减速器、谐波减速器 |