高层运动控制服务
提供机器人系统高层运动控制服务,通过HighLevelMotionController可以通过RPC通信方式实现对机器人的步态、特技、遥控的控制。
接口定义
HighLevelMotionController 是面向语义控制的高层运动控制器,支持如行走、特技、头部运动等控制操作,封装底层细节以供上层系统调用。
HighLevelMotionController
| 项目 | 内容 |
|---|---|
| 函数名 | HighLevelMotionController |
| 函数声明 | HighLevelMotionController(); |
| 功能概述 | 构造函数,初始化高层控制器状态 |
| 备注 | 构造内部控制资源 |
~HighLevelMotionController
| 项目 | 内容 |
|---|---|
| 函数名 | ~HighLevelMotionController |
| 函数声明 | virtual ~HighLevelMotionController(); |
| 功能概述 | 析构函数,释放控制器资源 |
| 备注 | 配合构造函数使用 |
Initialize
| 项目 | 内容 |
|---|---|
| 函数名 | Initialize |
| 函数声明 | virtual bool Initialize() override; |
| 功能概述 | 初始化控制器,准备高层控制功能 |
| 返回值 | true 表示成功,false 表示失败 |
| 备注 | 首次使用前必须调用 |
Shutdown
| 项目 | 内容 |
|---|---|
| 函数名 | Shutdown |
| 函数声明 | virtual void Shutdown() override; |
| 功能概述 | 关闭控制器并释放资源 |
| 备注 | 配合Initialize使用,安全断开连接 |
SetGait
| 项目 | 内容 |
|---|---|
| 函数名 | SetGait |
| 函数声明 | Status SetGait(const GaitMode gait_mode); |
| 功能概述 | 设置机器人步态模式(如锁定站立、平衡站立、拟人行走等) |
| 参数说明 | gait_mode:步态控制枚举 |
| 返回值 | Status::OK 表示成功,其他为失败 |
| 备注 | 阻塞接口,可切换多种步态模式 |
GetGait
| 项目 | 内容 |
|---|---|
| 函数名 | GetGait |
| 函数声明 | Status GetGait(GaitMode& gait_mode); |
| 功能概述 | 获取机器人步态模式(如锁定站立、平衡站立、拟人行走等) |
| 参数说明 | gait_mode:步态控制枚举 |
| 返回值 | Status::OK 表示成功,其他为失败 |
| 备注 | 阻塞接口,获取当前步态模式 |
ExecuteTrick
| 项目 | 内容 |
|---|---|
| 函数名 | ExecuteTrick |
| 函数声明 | Status ExecuteTrick(const TrickAction trick_action); |
| 功能概述 | 执行特技动作(如庆祝、挥手等) |
| 参数说明 | trick_action:特技动作标识 |
| 返回值 | Status::OK 表示成功,其他为失败 |
| 备注 | 阻塞接口,需确保机器人当前可执行特技 注意事项:特技动作必须要在GaitMode::GAIT_BALANCE_STAND(46)步态下才能进行 |
- 注意事项:特技动作必须要在GaitMode::GAIT_BALANCE_STAND(46)步态下才能进行特技展示
SendJoyStickCommand
| 项目 | 内容 |
|---|---|
| 函数名 | SendJoyStickCommand |
| 函数声明 | Status SendJoyStickCommand(const JoystickCommand& joy_command); |
| 功能概述 | 发送实时摇杆控制指令 |
| 参数说明 | joy_command:包含摇杆坐标的控制数据 |
| 返回值 | Status::OK 表示成功,其他为失败 |
| 备注 | 非阻塞接口,建议发送频率为 20Hz |
类型定义
JoystickCommand — 高层运动控制摇杆指令结构体
| 字段名 | 类型 | 描述 |
|---|---|---|
left_x_axis | float | 左侧摇杆的X轴方向值(-1.0:左,1.0:右) |
left_y_axis | float | 左侧摇杆的Y轴方向值(-1.0:下,1.0:上) |
right_x_axis | float | 右侧摇杆的X轴方向值(旋转 -1.0:左,1.0:右) |
right_y_axis | float | 右侧摇杆的Y轴方向值(暂未定义用途) |
枚举类型定义
GaitMode — 机器人步态模式枚举
| 枚举值 | 数值 | 描述 |
|---|---|---|
GAIT_PASSIVE | 0 | Passive |
GAIT_RECOVERY_STAND | 1 | 站立锁定 |
GAIT_PURE_DAMPER | 10 | 阻尼模式 |
GAIT_HUMANOID_WALK | 11 | 拟人行走 |
GAIT_BALANCE_STAND | 46 | 平衡站立(支持移动) |
GAIT_LOWLEVL_SDK | 200 | 底层控制SDK模式 |
TrickAction — 特技动作指令枚举
| 枚举值 | 数值 | 描述 |
|---|---|---|
ACTION_RECOVERY_STAND | 103 | 平衡站立 |
ACTION_CELEBRATE | 201 | 庆祝 |
ACTION_SHAKE_HAND_REACHOUT | 217 | 握手 - 伸出 |
ACTION_SHAKE_WITH_DRAW | 218 | 握手 - 撤回 |
ACTION_NOD | 219 | 点头 |
ACTION_SHAKE | 220 | 摇头 |
ACTION_CIRCLE_HEAD | 221 | 摇头晃脑 |
ACTION_GTEETING | 301 | 打招呼 |
ACTION_POINT_GROUND | 302 | 指地 - 伸出 |
ACTION_POINT_GROUND_WITH_DRAW | 303 | 指地 - 撤回 |
ACTION_SPREAD_HAND | 304 | 张手 |
ACTION_SPREAD_HAND_WITH_DRAW | 305 | 张手 - 撤回 |
ACTION_TURN_AWAY | 306 | 扭身朝后 |
ACTION_TURN_BACK | 307 | 扭身朝前 |
遥控器示意图
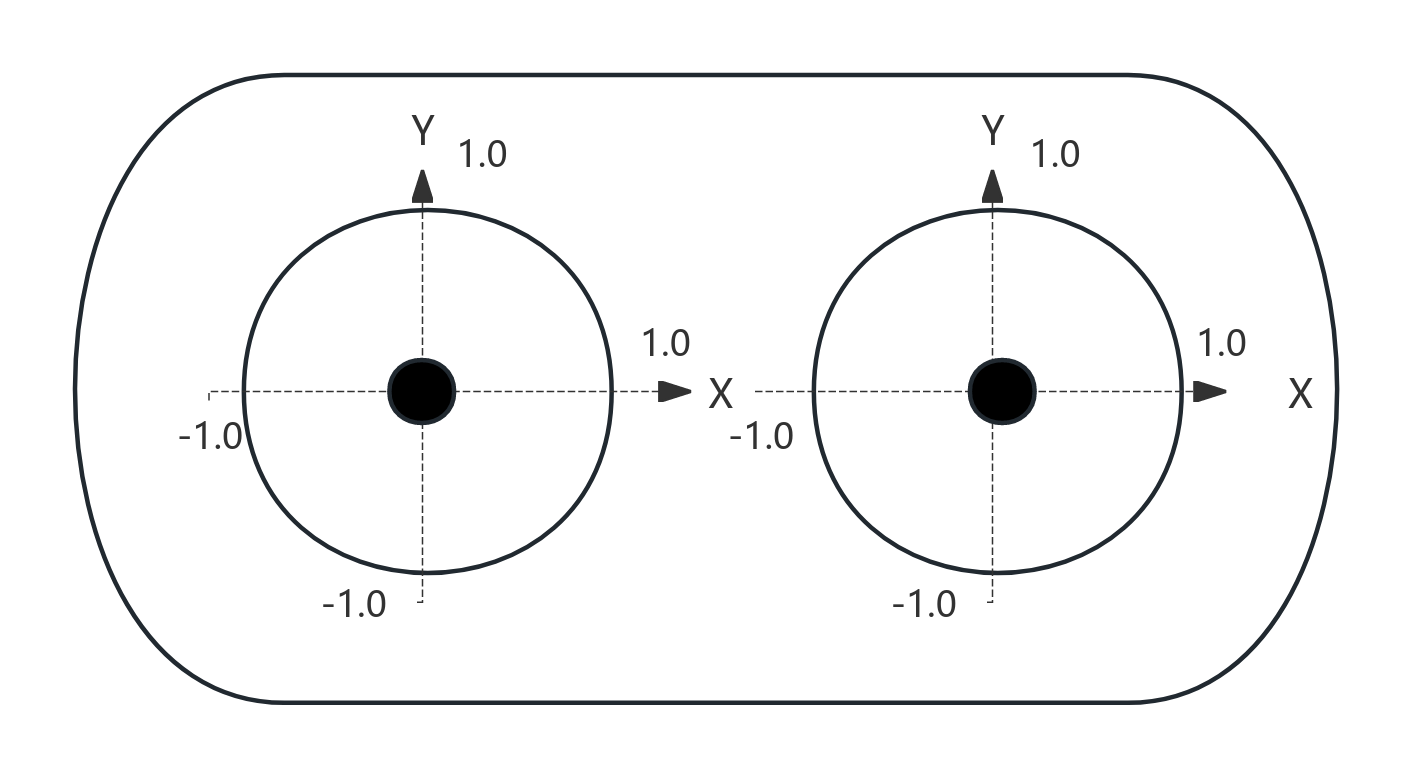
- 左右摇杆x轴和y轴的取值范围为[-1.0, 1.0];
- 左右摇杆x轴和y轴的方向上/右为正,如示意图所示;
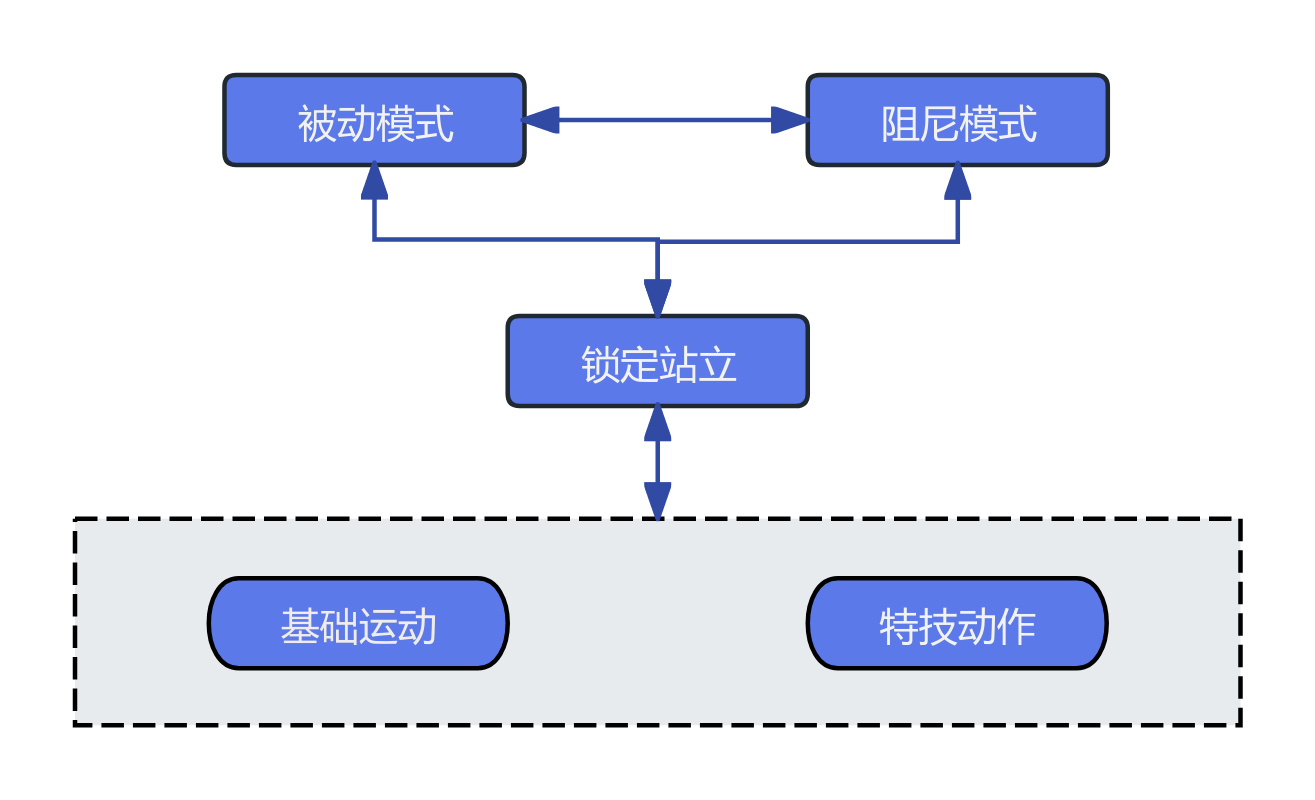
高层运动控制机器人状态介绍
机器人的运动包含站立锁定、平衡站立、基础运动、特技动作状态,机器人在运行过程中,通过状态机在不同状态之间进行切换,以实现不同的控制任务。各个状态的解释说明如下:
- 站立锁定:站立锁定是连接机器人挂起落地和平衡站立的状态,机器狗需要进入平衡站立状态后,才能调用相应的运动服务实现机器人的控制。
- 平衡站立:在平衡站立状态下,可调用SDK的各部分接口实现机器人的特技动作和基础运动控制。
- 基础运动:在运动执行过程中,可调用SDK接口,让机器人进入不同的步态。
- 特技动作:当进入特殊动作执行状态后,其他运动控制服务会先被挂起,等待当前动作执行完毕并进入平衡站立状态后再生效。
机器人状态切换机制;
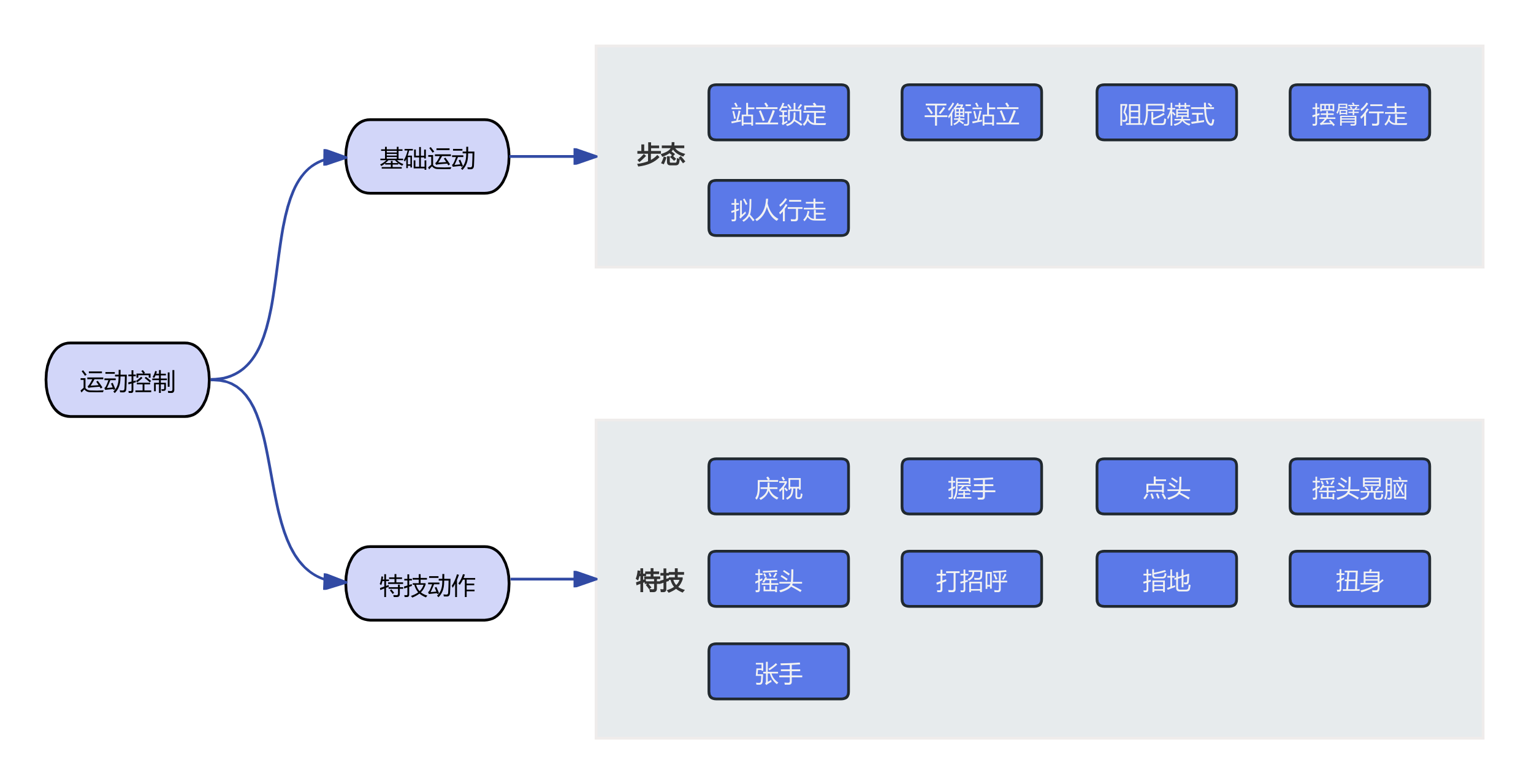
高层运动控制接口
机器人的高层运动控制服务可分为基础运动控制和特技动作控制。
- 基础运动控制服务中,可调用相应的接口,根据不同的地形场景和任务需求切换机器人的行走步态。
- 特技动作控制服务中,可调用相应的接口,实现机器人内置的特殊特技,比如庆祝、握手、打招呼等。
步态切换
| 当前步态 | 步态切换流程 | 示意图 |
|---|---|---|
| 站立锁定 | 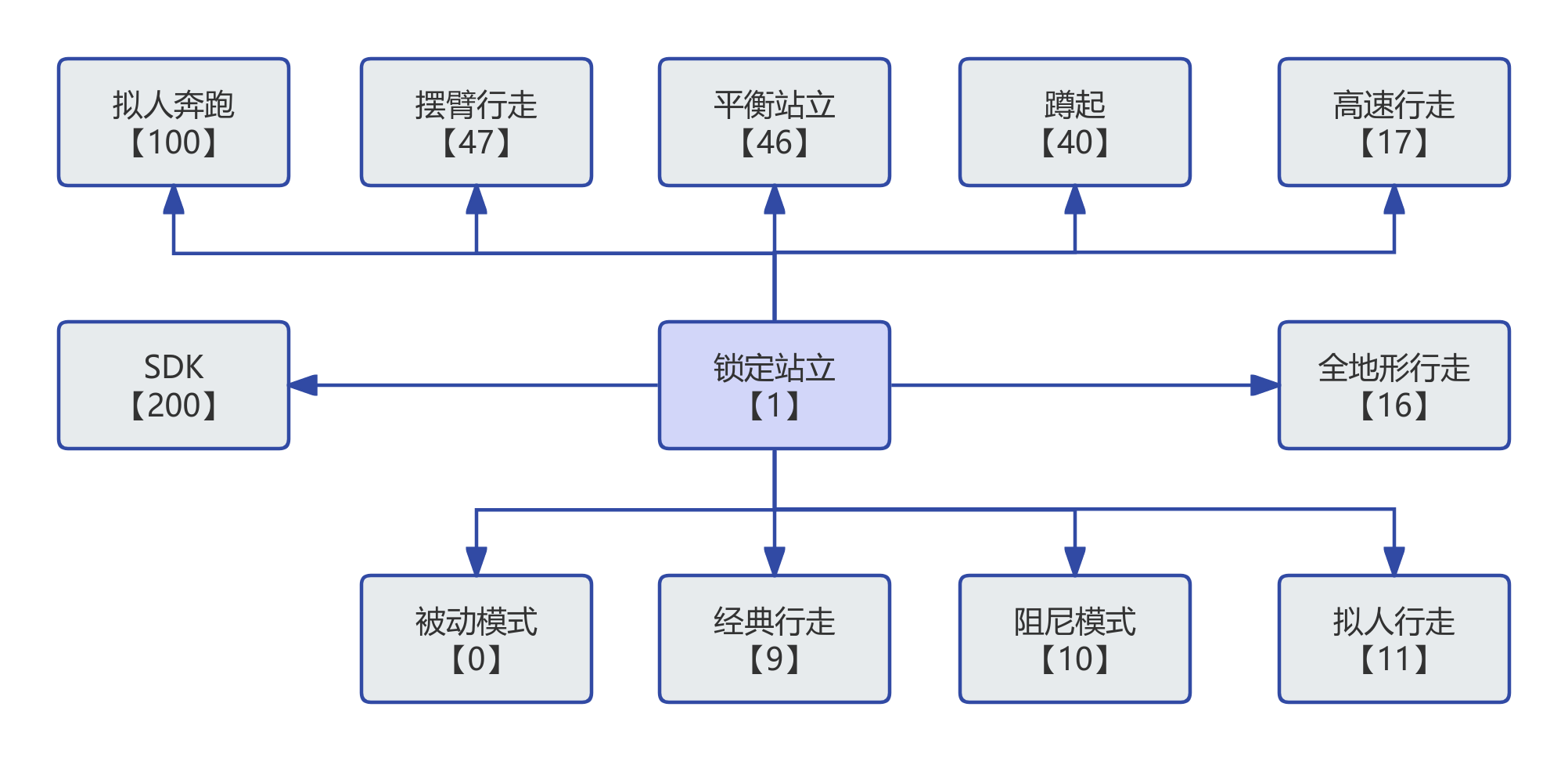 |  |
| 拟人行走 | 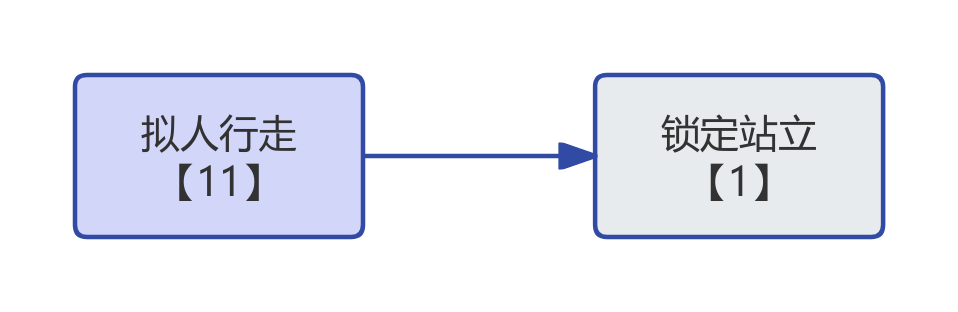 |  |
| 平衡站立 | 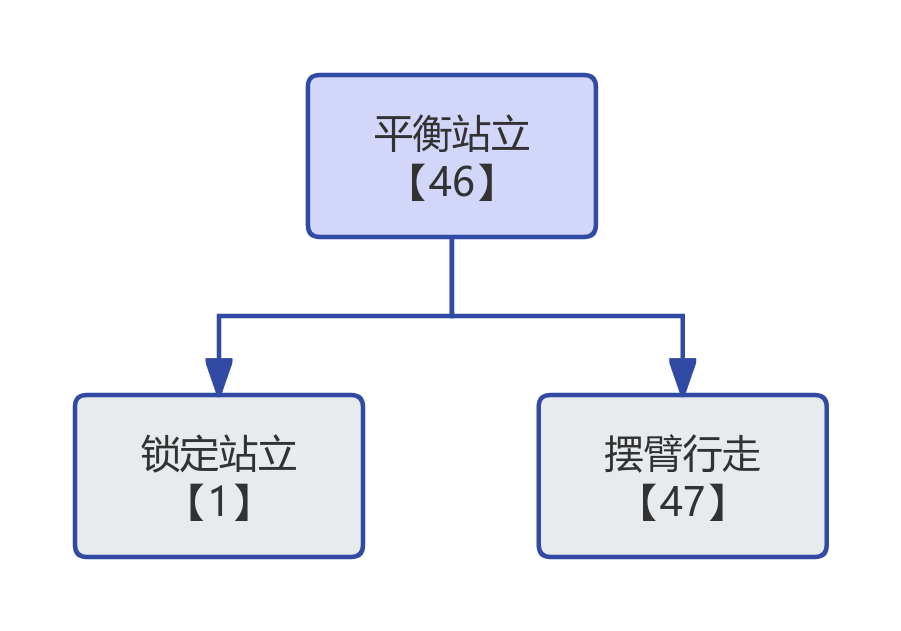 |  |
| 摆臂行走 | 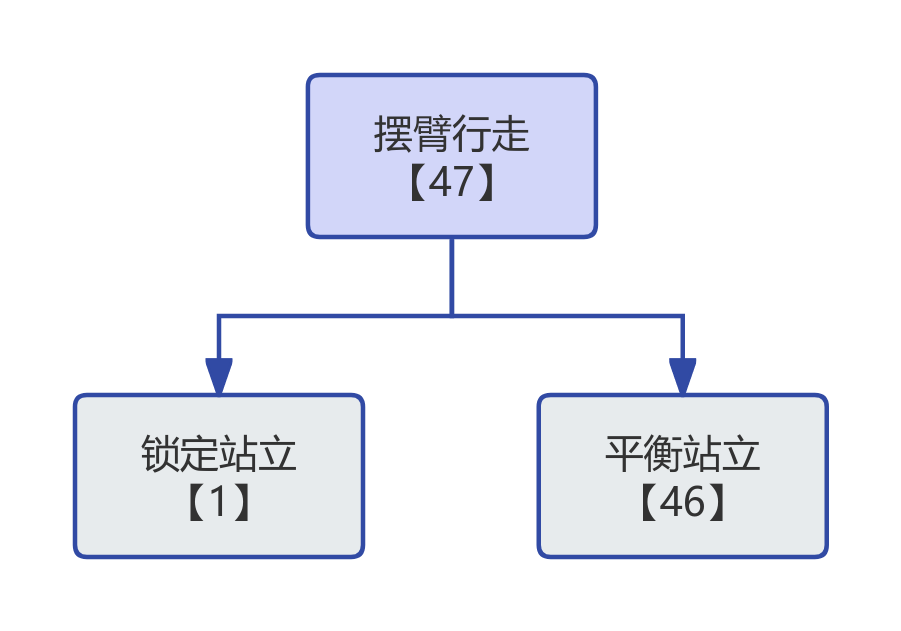 |  |
特技执行
| 特技 | 特技执行流程 | 示意图 |
|---|---|---|
| 庆祝 | 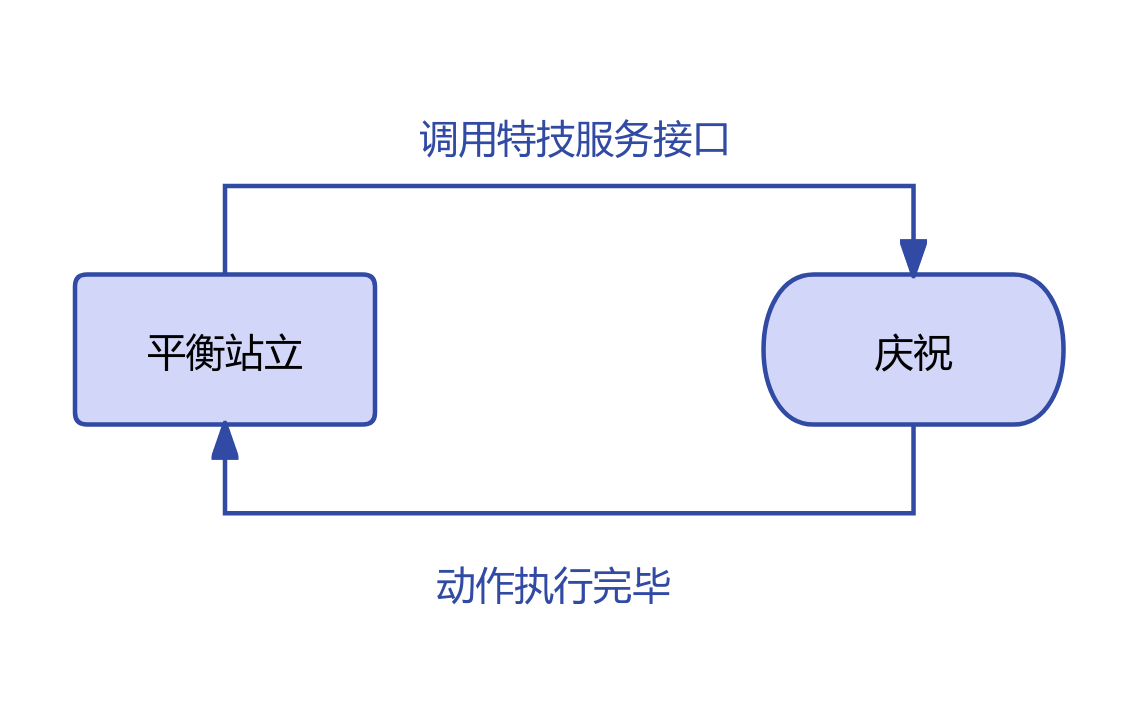 |  |
| 握手 | 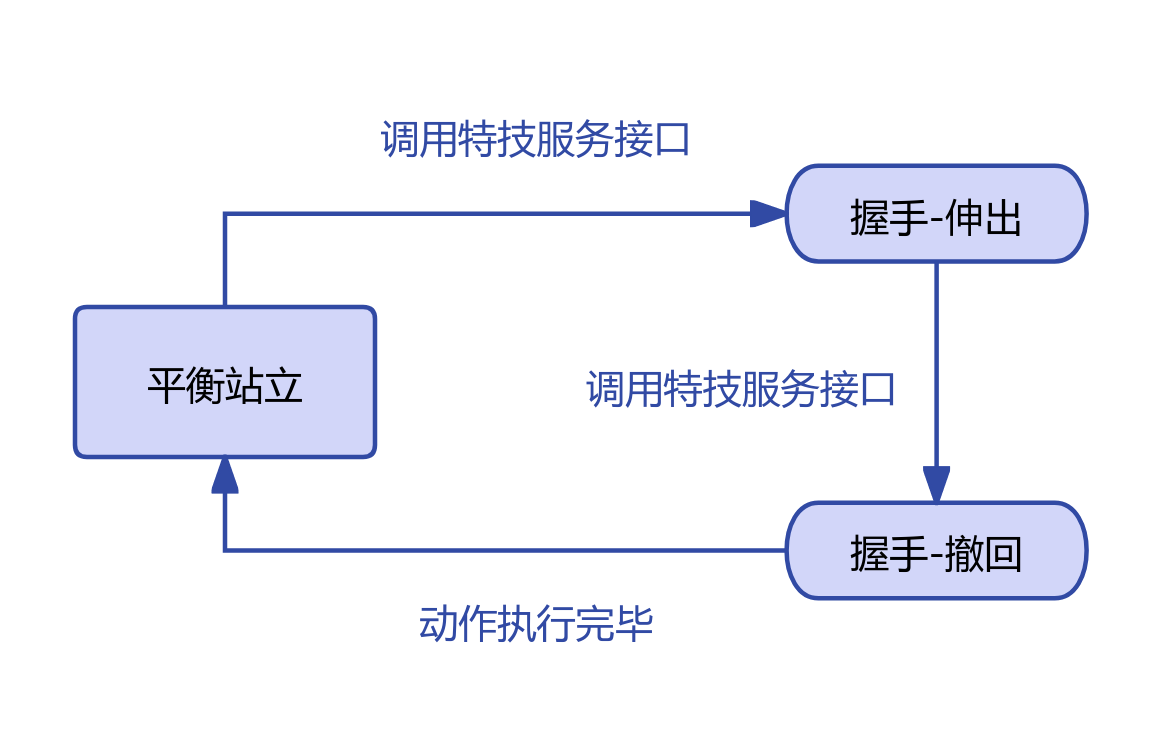 |  |
| 点头 | 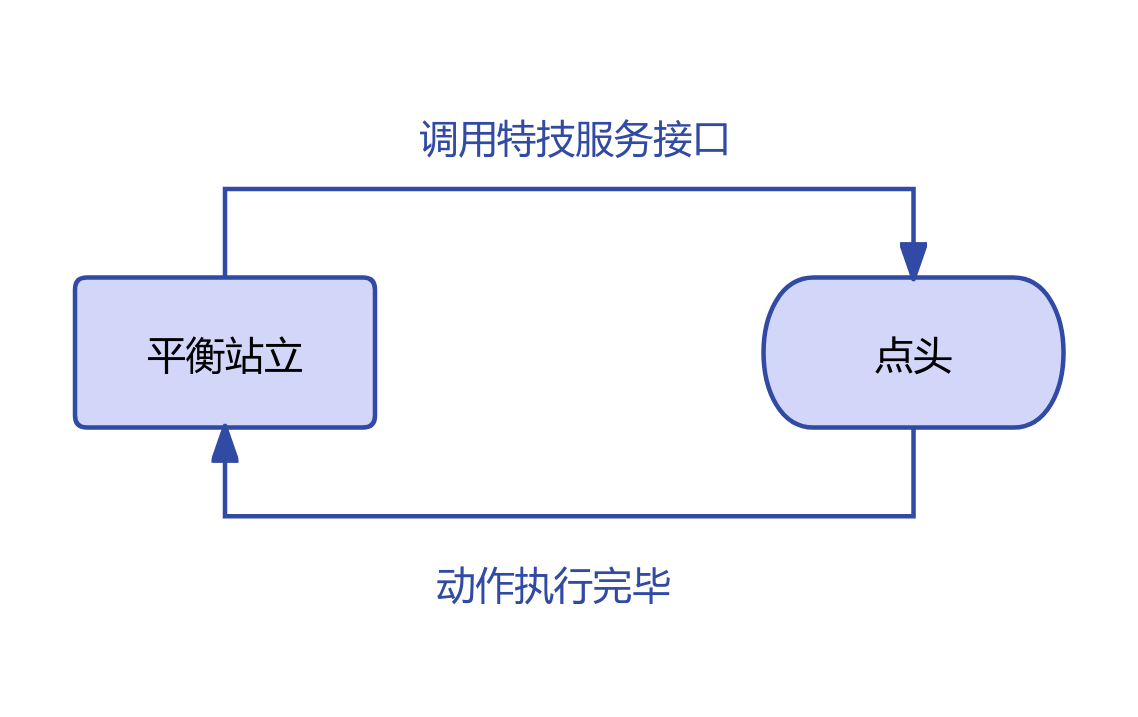 |  |
| 摇头 | 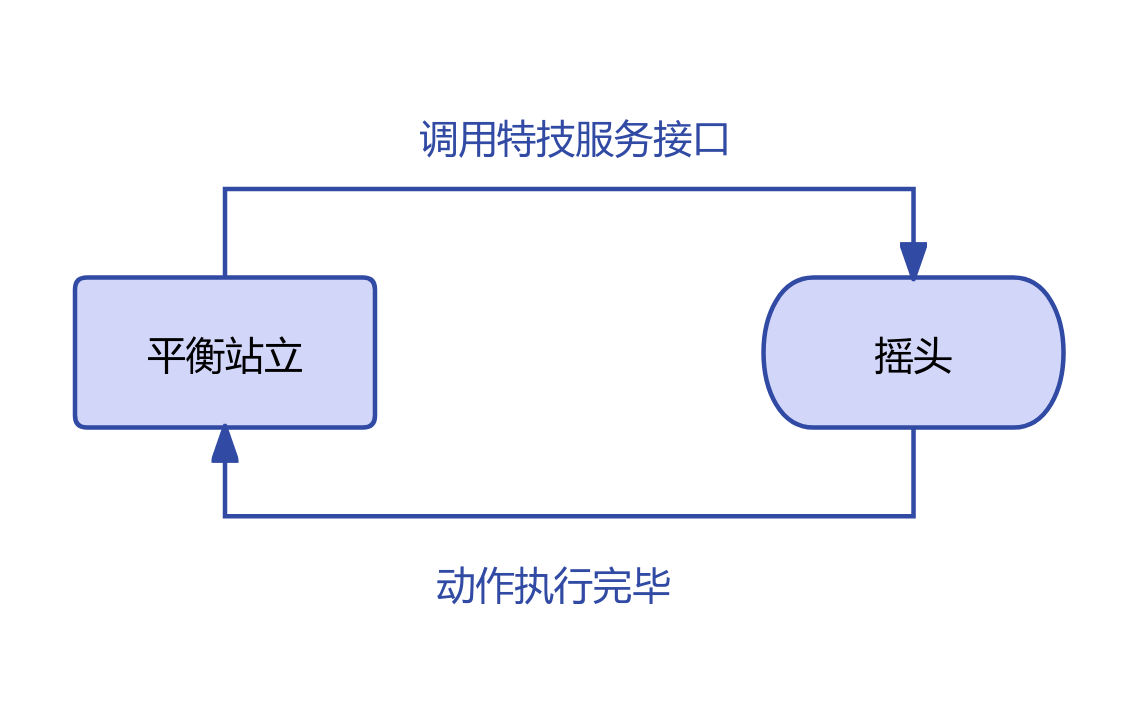 |  |
| 摇头晃脑 | 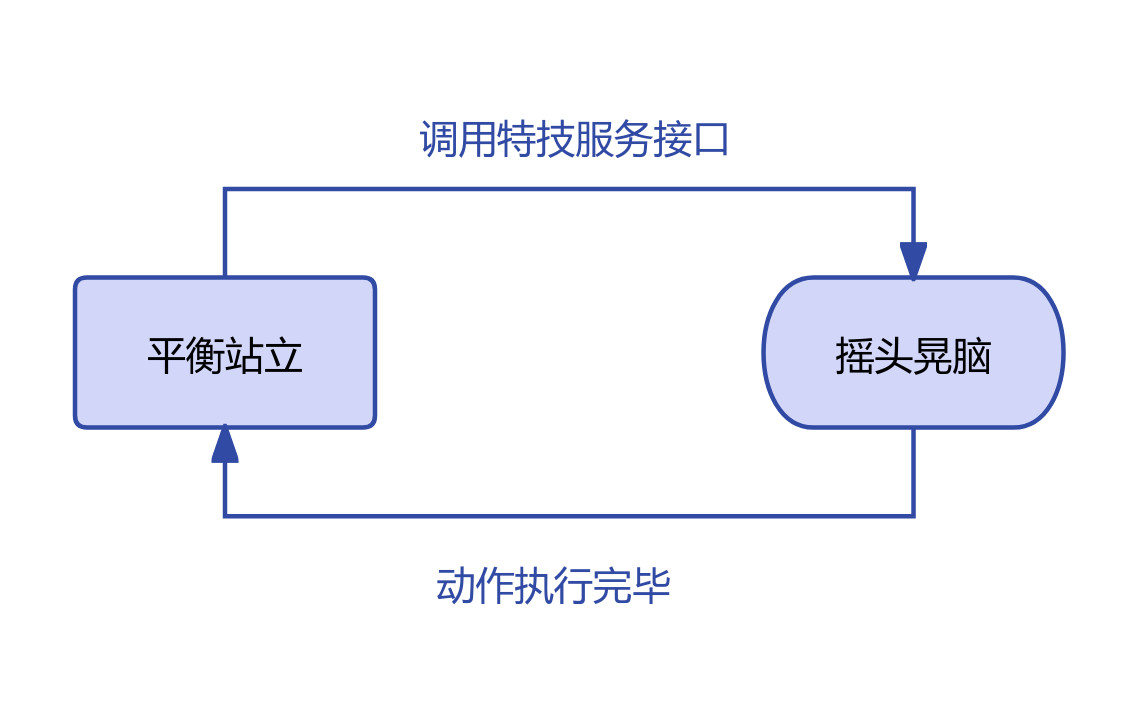 |  |
| 打招呼 | 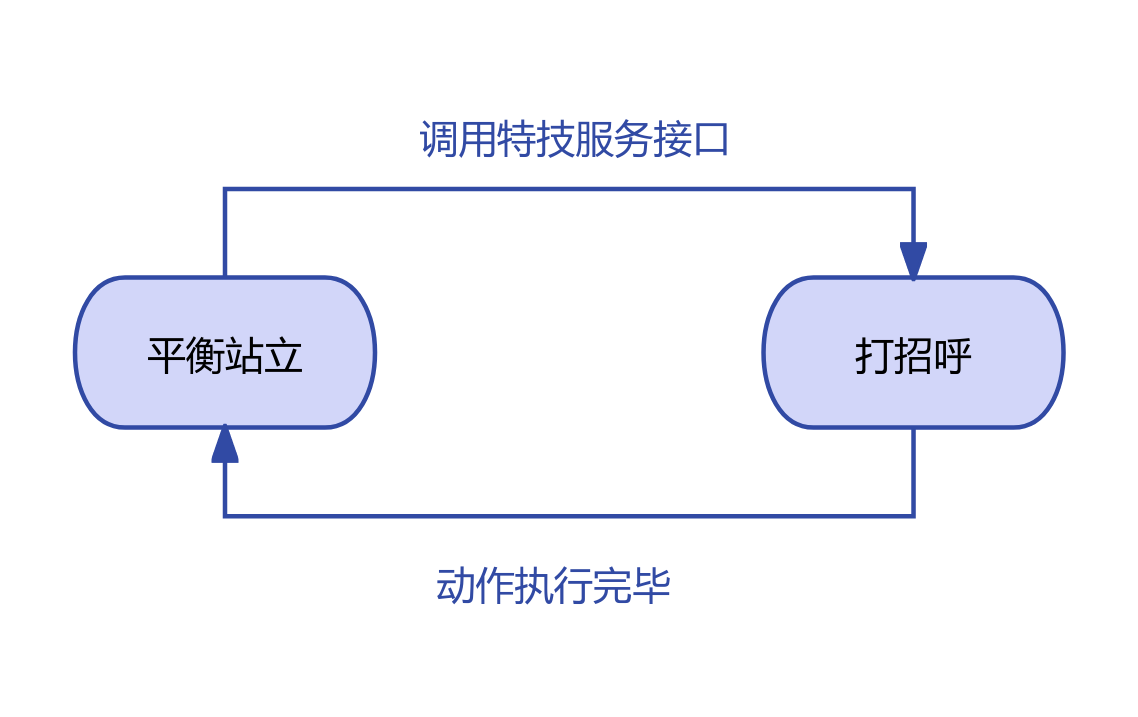 |  |
| 指地 | 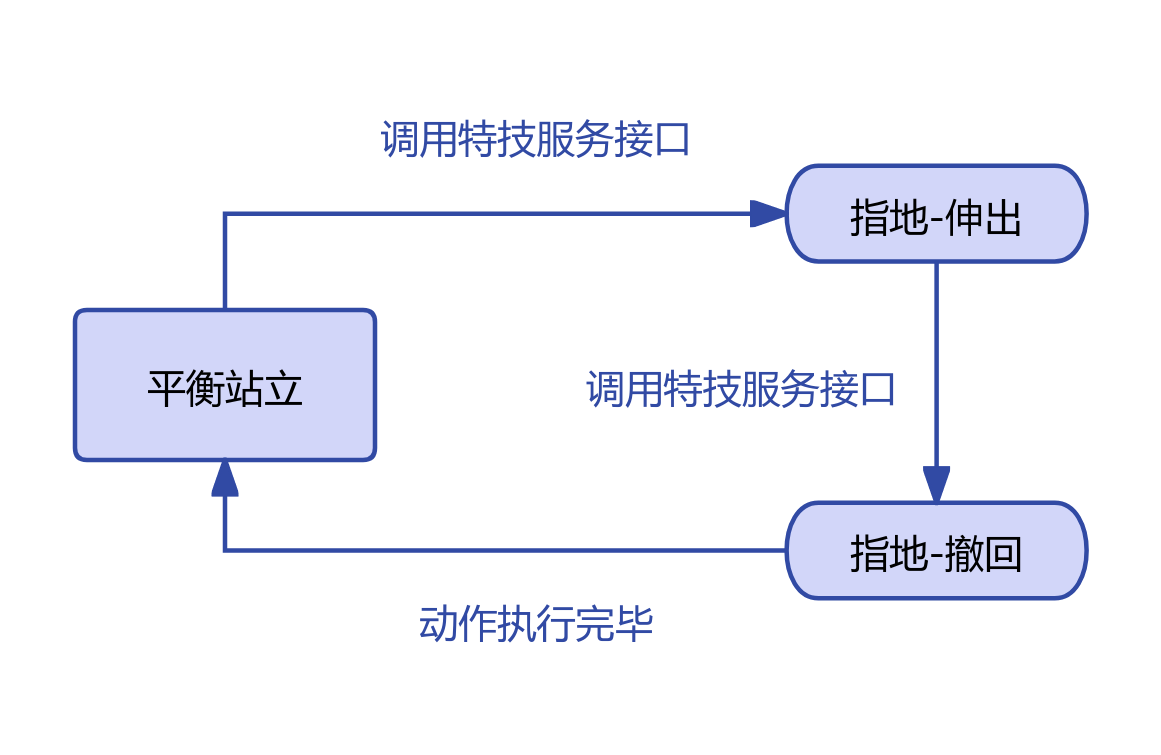 |  |
| 张手 | 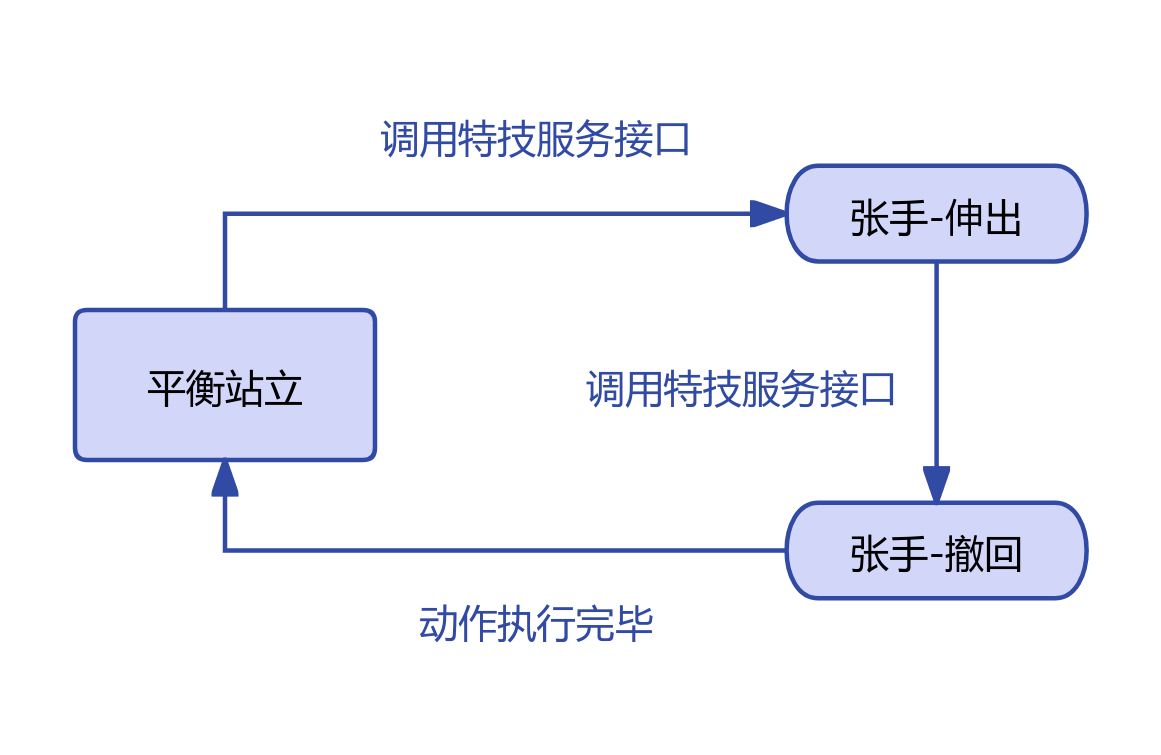 |  |
| 扭身 | 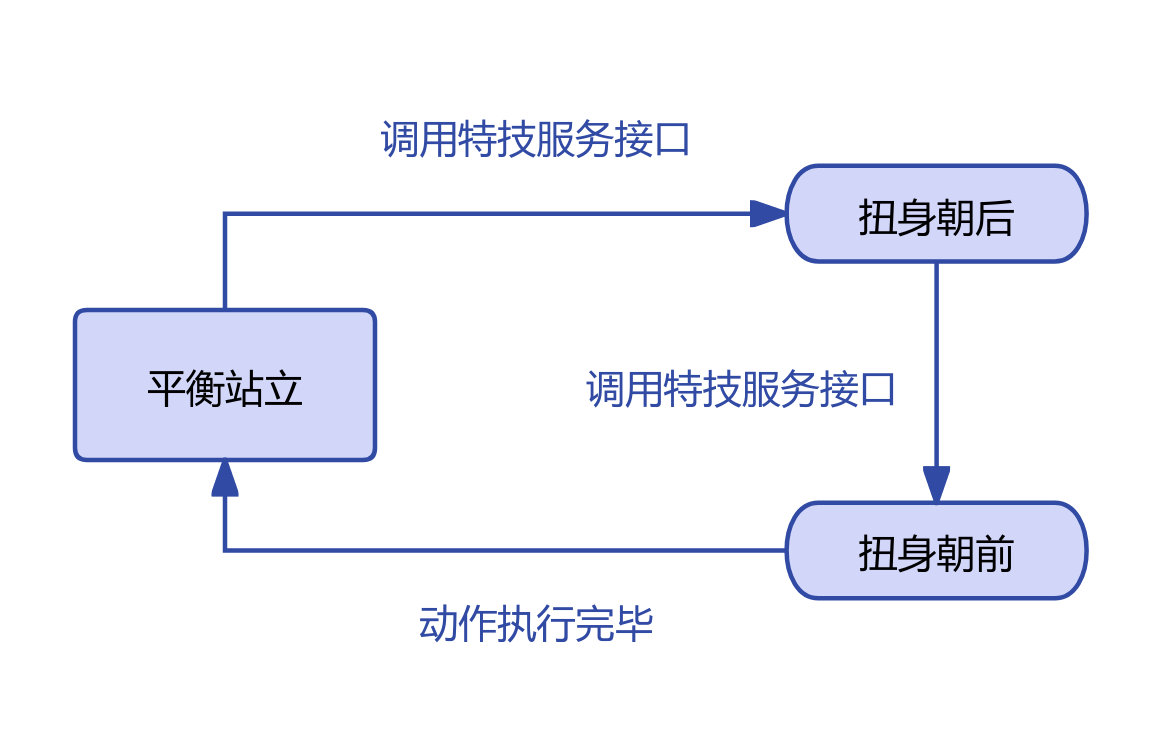 |  |