遥控器按键说明
教学视频
功能说明
| 参数 | 开发计算单元 |
|---|---|
| 遥控器开机 | 长按3秒,一键开机,且无需人为干预 |
| 遥控器关机 | 长按3秒,一键关机,且无需人为干预 |
| 充电 | USB-C直插快充 |
| APP配对 | 通过手机APP配对 |
| 机器人状态切换 | 阻尼,recover stand, RL模式之间切换 |
| 机器人步态切换 | ArmAutoSwin 47,行走 baseline k_lowlevel 8,ArmTune 46之间切换 |
| 机器人特技切换 | 张手、回手、转身、回身之间切换 |
| 手机和遥控器交互 | 支持将手机夹持到遥控器上1. 遥控器优先级高于APP:如果同时用遥控器和APP操控,则只能遥控器控制2. 支持分别控制机器人 |
| 拆卸和收纳 | 遥控器摇杆可拆卸和收纳 |
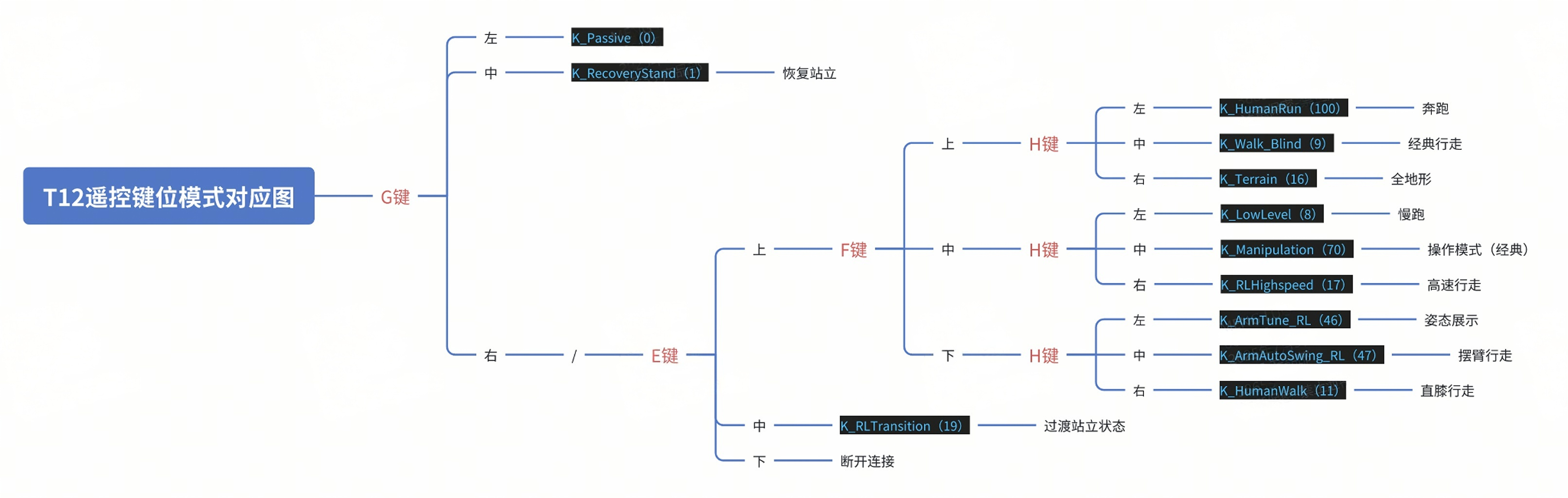
模式切换

遥控器检查
检查遥控器摇杆是都在中位,摇杆是否进入沙土等异物;
检查遥控器的各个按键是否存在卡顿;
将遥控器各拨杆恢复至初始状态,并确认遥控器电池是否电量充足,具体操作步骤如下:
如图所示,将遥控器上的电源键先短按后长按,打开遥控器;
此时遥控器下方中央的指示灯亮起,从左至右分别表示遥控器的电量状态。当亮起
第1、2、3、4个灯时,对应的电量分别为25%、50%、75%、100%;
如使用遥控器遥控方式,遥控器开机前需将各控制拨杆置于初始状态,"G"拨动至最左侧,"E"拨杆拨动至最上侧,"F"拨杆拨动至最下侧,"H"拨杆拨动至中间侧。

遥控器开启与关闭
电源按键先短按一次再长按,待电量指示灯亮起即开机成功;
电源按键先短按一次再长按,待电量指示灯熄灭即关机成功。
开机时遥控器操作
短按一下长按开关键,指示灯亮灯后,遥控机开机成功;
机器人必须固定在保护支架上,将遥控器上的"G"拨杆由左侧拨动至中间;
观察到机器人腿部和手部均有小幅度关节位移,四肢会缓慢进入站立状态
控制保护支架缓慢下降,下放机器人站立在地面,站立后,观察机器人的站立是否平衡,如无抖动、前后左右倾倒等异常则站立平衡;

行走模式切换
确认机器人已处于站立状态并且落置于地面上;
将遥控器上的"G"拨杆往最右侧拨动,"H"拨杆拨动至中间,"F"拨杆拨动至最下侧,进入摆臂行走模式,此模式下,机器人步态沉稳;
将遥控器上的"G"拨杆往最右侧拨动,"H"拨杆拨动至右侧,"F"拨杆拨动至最下侧,进入拟人行走模式,此模式下,机器人步态轻盈。
停止并返回站立状态
在摆臂行走模式和拟人行走模式下:
遥控机器人保持停止状态;
将遥控器上的"G"拨杆往中间拨动,机器人进入站立状态。
注意:切勿在行走过程中直接将遥控器上的"G"拨杆往中间或最左侧拨动;
急停
遇到以下紧急情况,需要及时将遥控器上的"G"拨杆拨动至最左侧,会让机器人的关节失能。此时关节断电,机器人无法保持任何姿态,会立即瘫软并倒下:
机器人冒烟或有焦味;
有水或其他异物进入机器人;
机器人失控,无法通过遥控器或其他方式停止;
机器人损坏,可能导致进一步危险;
紧急避险,如高空作业或危险环境中失控;
外部环境突变,如地震、火灾等。
注意:将遥控器上的"G"拨杆拨动至最左侧之前,机器人必须固定在保护支架上。
关机时遥控器操作
确认将遥控器上的"G"拨杆往中间拨动;使机器人进入站立状态;
将机器人固定在支架上,并向上吊起;
长按机器人背部开关机按键(约6秒)电源状态灯熄灭,此时机器人关机断电;