概述
部件名称
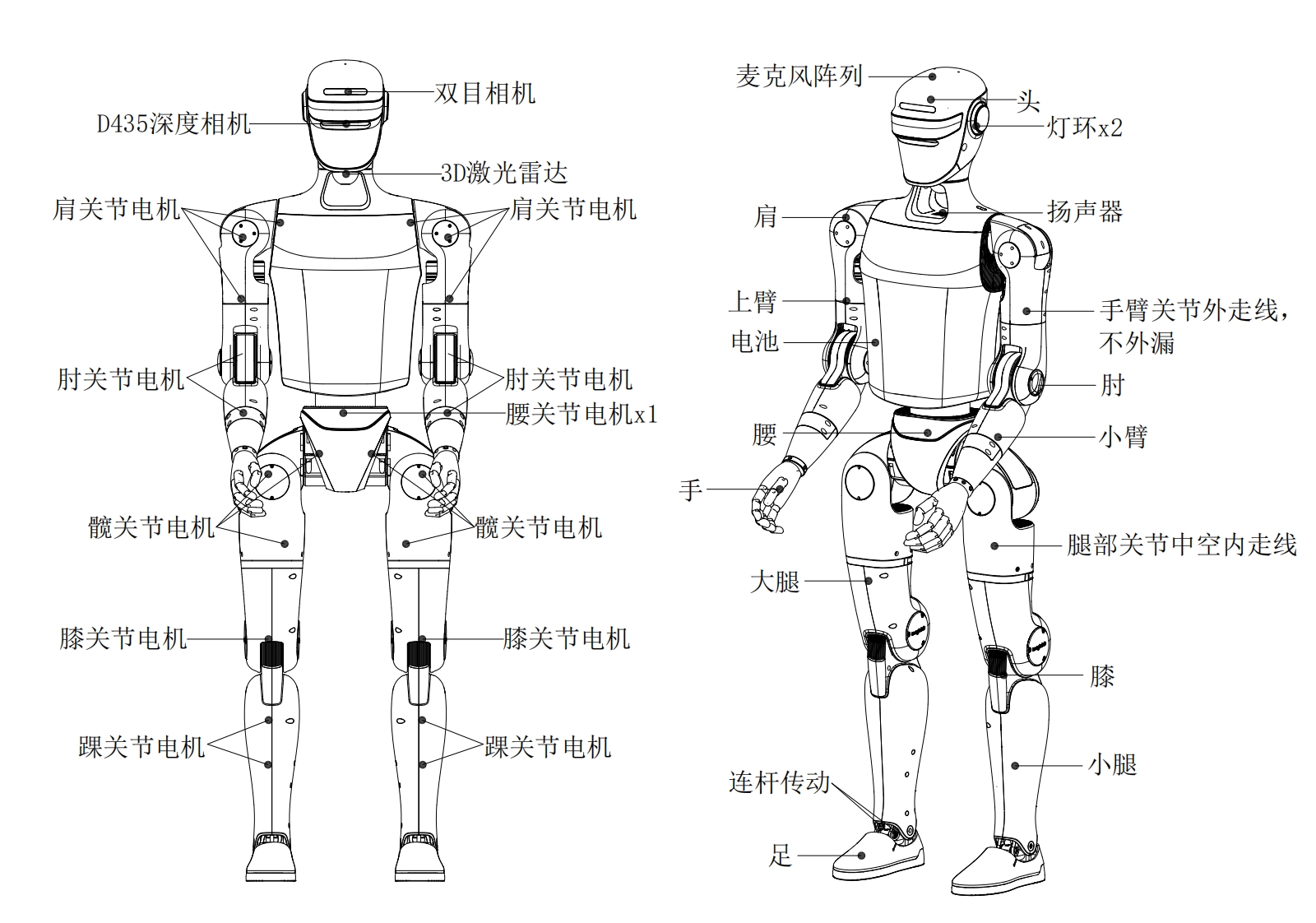
MagicBot Z1 整机分为上半身和下半身,具备多个自由度。头部具有 1 个自由度(Yaw)。单手臂拥有 5+ 个自由度,包括肩身关节、上臂关节、手肘关节和腕关节(选配)。单腿拥有 6 个自由度,包括胯关节、腿关节、髋关节、膝关节和踝关节。腰部具备 1 自由度(Yaw)。整机根据版本不同,可以分为 Z1 基础版本 24 自由度,Z1 开发版可选 24 ~ 50 自由度,拥有多个关节电机自由度,使得机器人能够实现精确的运动和姿态控制。MagicBot Z1_24 自由度人形机器人本体如下图所示,具体请以实物为准。
灵巧手 MagicHand S01
| 灵巧手 MagicHand S01规格参数 | |
|---|---|
| 结构外观 | 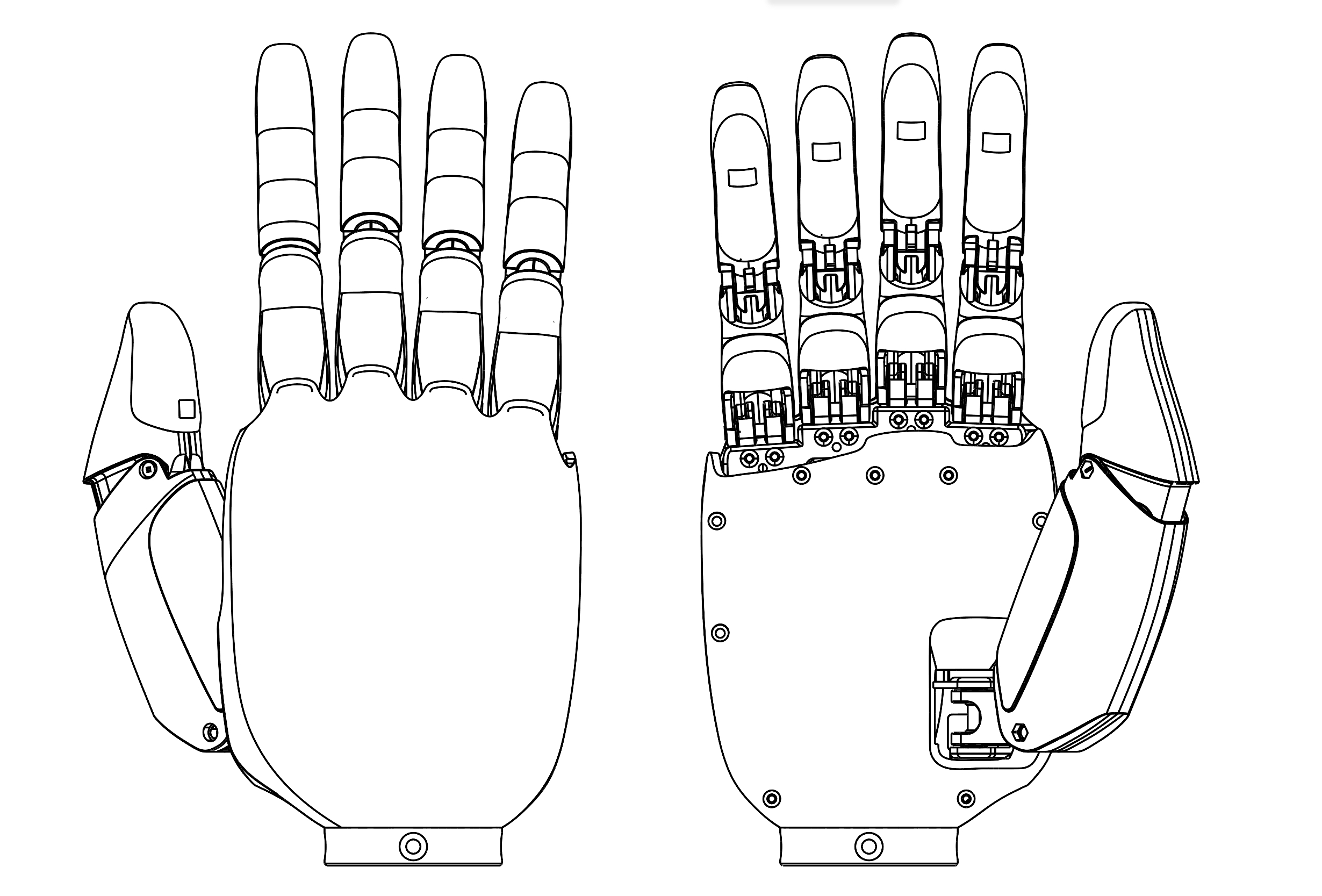 |
| 长宽厚 | 200mm x 87mm x 55mm |
| 整手重量 | ≤650g |
| 指数 | 5 |
| 总自由度(关节数) | 11 |
| 主动自由度(电机数) | 6, 普指主动自由度:1; 拇指主动自由度:2 |
| 关节角度 | 普指弯曲:13° ~ 203°;拇指弯曲:-9° ~ 66.6°;拇指侧摆:71° ~ 180°。 |
| 驱动方式 | 空心杯电机+减速齿轮箱+T型丝杆 |
| 传动方式 | 连杆传动 |
| 可实现动作 | 捏合、抓握、按、提、推等拟人动作 |
| 工作电压 | DC12V |
| 静态电流 | 0.1A @12V |
| 最大电流 | 3A@12V |
| 接近觉方案 | ToF |
| 触觉传感器数量 | 5个 |
| 触觉传感器维度 | 法向力、切向力 |
| 触觉传感器分辨率* | 0.1N |
| 触觉传感器量程 | 0.1-10N |
| 单指握力* | 2.5kg |
| 四指握力* | 9.1kg |
| 整手负载* | 5kg |
| 末端重复定位精度* | 0.1mm |
| 张合时间* | 1.2s |
| 拇指侧摆速度* | 112°/s |
| 拇指弯曲速度* | 106°/s |
| 四指弯曲速度* | 150°/s |
| 通讯接口 | RS485、EtherCAT |
| SDK语言 | C++ |
| 耐久性寿命* | 10万次以上 |
*单指握力、四指握力、整手负载等参数为实验室环境下测得。
*以上参数在不同业务场景和机型配置下可能存在差异,请以实际使用体验为准。
电气接口
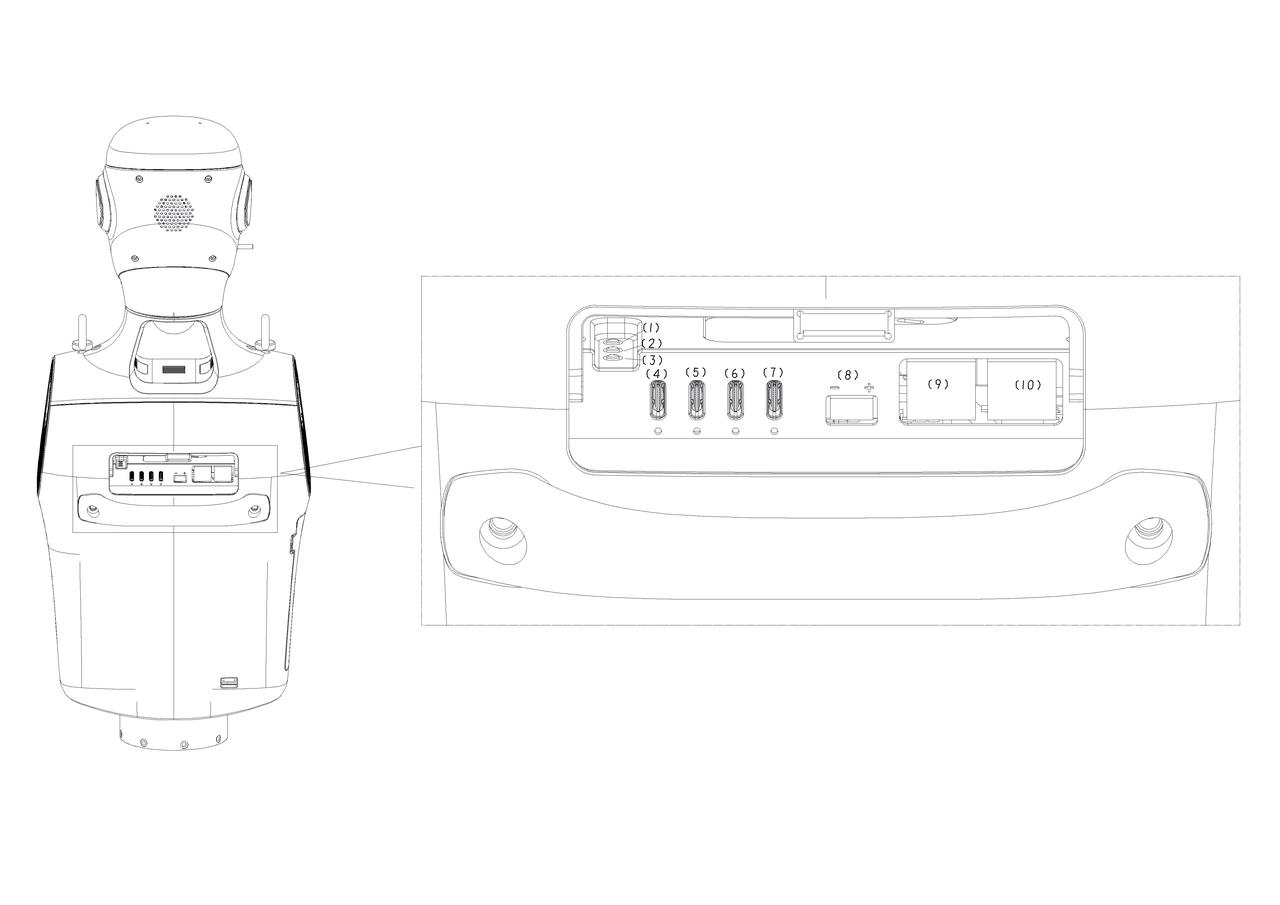
MagicBot Z1 的背部配备了电气接口,这些接口用于连接各个机身关节电机、传感器外设、网口等。这样的设计使您能够方便地进行调试、排查问题以及进行二次开发。
| 序号 | 接口类型 | 接口名称 | 使用说明 |
|---|---|---|---|
| 1 | 按键 | 遥控器匹配 | 长按此按键,遥控器开机,开始配对,遥控器的蜂鸣器鸣叫完成配置,释放按键。具体可以参考遥控器的使用说明书。 |
| 2 | 按键 | 无线急停匹配 | 短按 3 次,进入配对模式,遥控器按任意键,可以匹配成功 |
| 3 | 按键 | 蓝牙配网按键 | 短按一次,进入蓝牙匹配模式 |
| 4 | Type-C | Type-C USB3.0 | 支持 USB3.0 Host,最大 5V/1.5A 输出 |
| 5 | Type-C | Type-C USB3.0 | 支持 USB3.0 Host,最大 5V/1.5A 输出 |
| 6 | Type-C | Type-C USB3.0 | 支持 USB3.0 Host,最大 5V/1.5A 输出 |
| 7 | Type-C | Type-C USB3.0 | 支持 USB3.0 Host,最大 5V/1.5A 输出 |
| 8 | XT30PW-M30.G.Y | VBAT | 直连电池输出,电压 54V,电流建议不超过 5A。注意正负极 |
| 9 | RJ45 | 1000Base-T | 支持 10/100/1000Mbps,支持调试 |
| 10 | RJ45 | 1000Base-T | 支持 10/100/1000Mbps,支持调试 |
机载计算机
MagicBot Z1 机载标配 1 块【运控计算单元】,并且标配一块【开发计算单元】。
| 参数 | 开发计算单元 |
|---|---|
| 型号 | Jetson Orin NX |
| CPU | Arm® Cortex®-A78AE |
| 内核数 | 8 |
| 线程数 | 8 |
| 最大睿频频率 | 2GHz |
| 显存 | 16G |
| 内存 | 16G |
| 缓存 | 2MB L2 + 4MB L3 |
| 存储 | 512G |
| GPU | 搭载 32 个 Tensor Core 的 1024 核 NVIDIA Ampere 架构 GPU |
| 显卡最大动态频率 | 918MHz |
| 高斯和神经加速器 | 3 |
| 指令集 | 64bit |
| OpenGL | 4.6 |
| OpenGL ES | 3.2 |
| Vulkan™ | 1.1 |
| CUDA | 11.4 |
【运控计算单元】为魔法原子运动控制程序专用,不对外开放。开发者仅可使用【开发计算单元】进行二次开发。
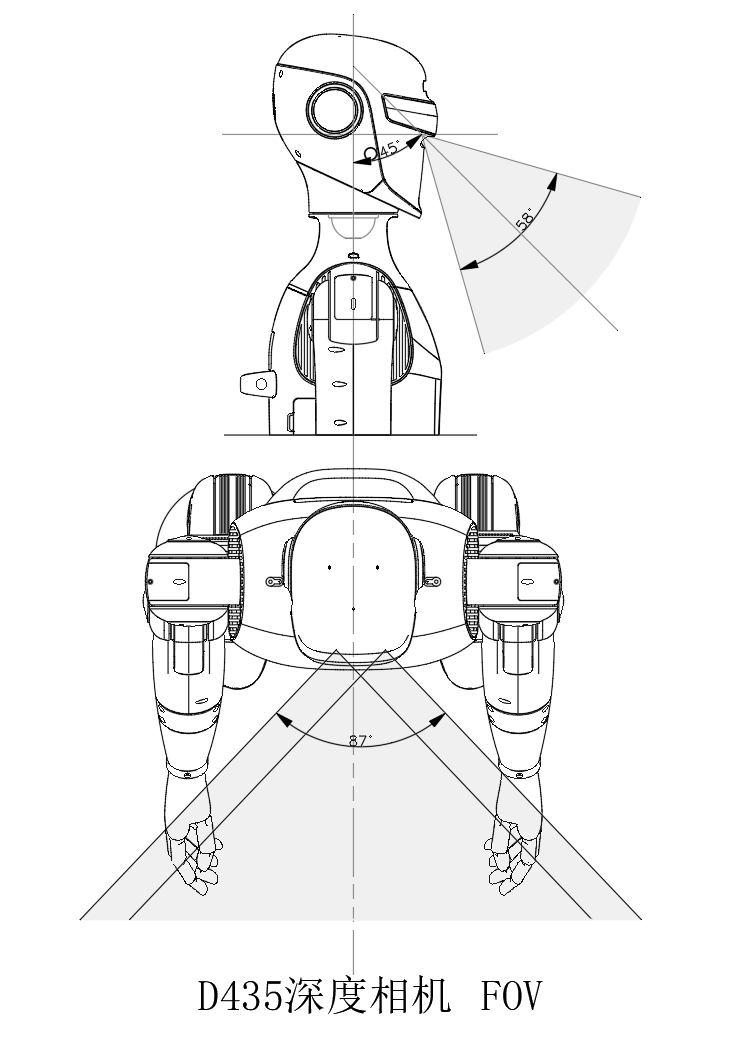
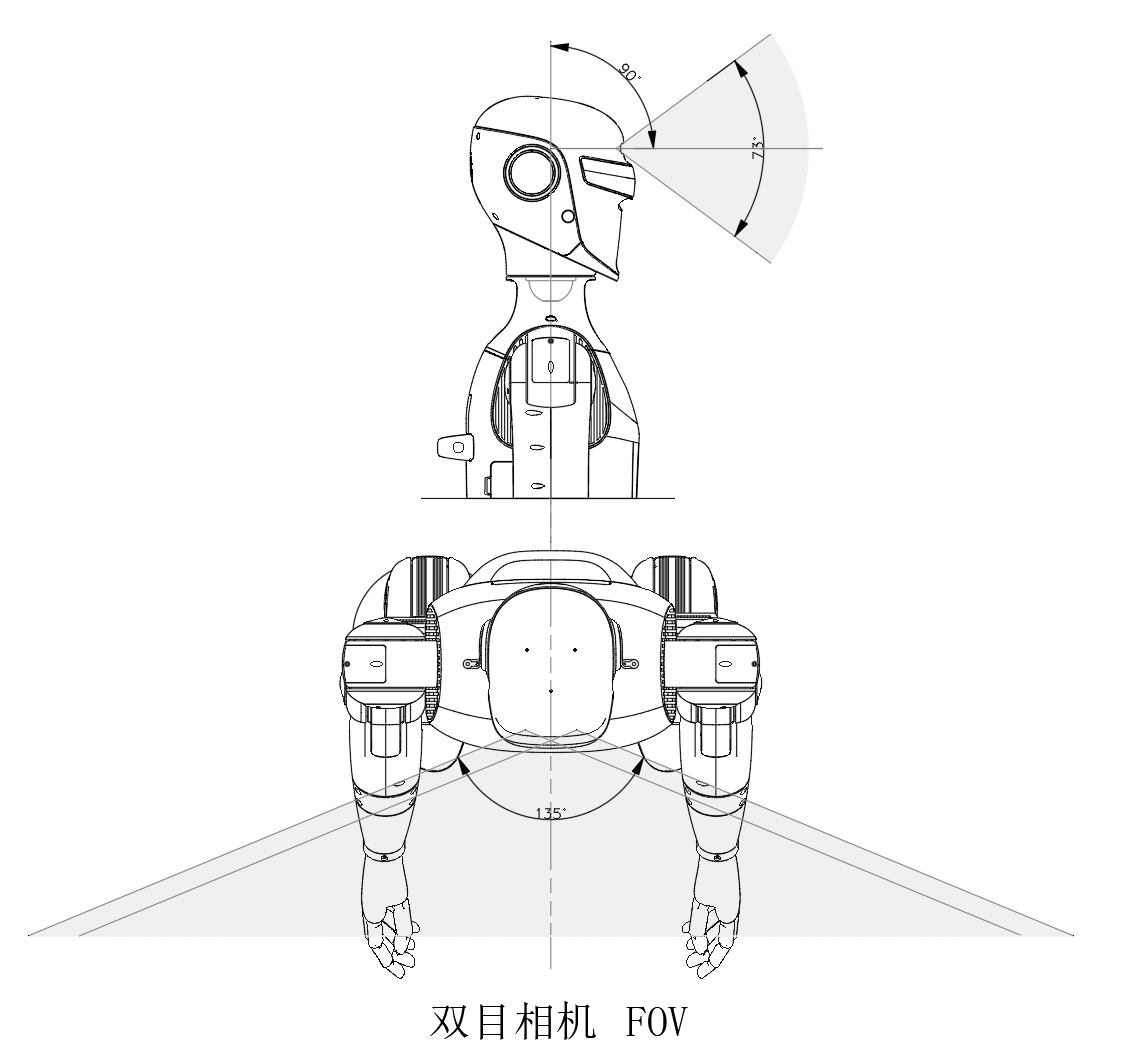
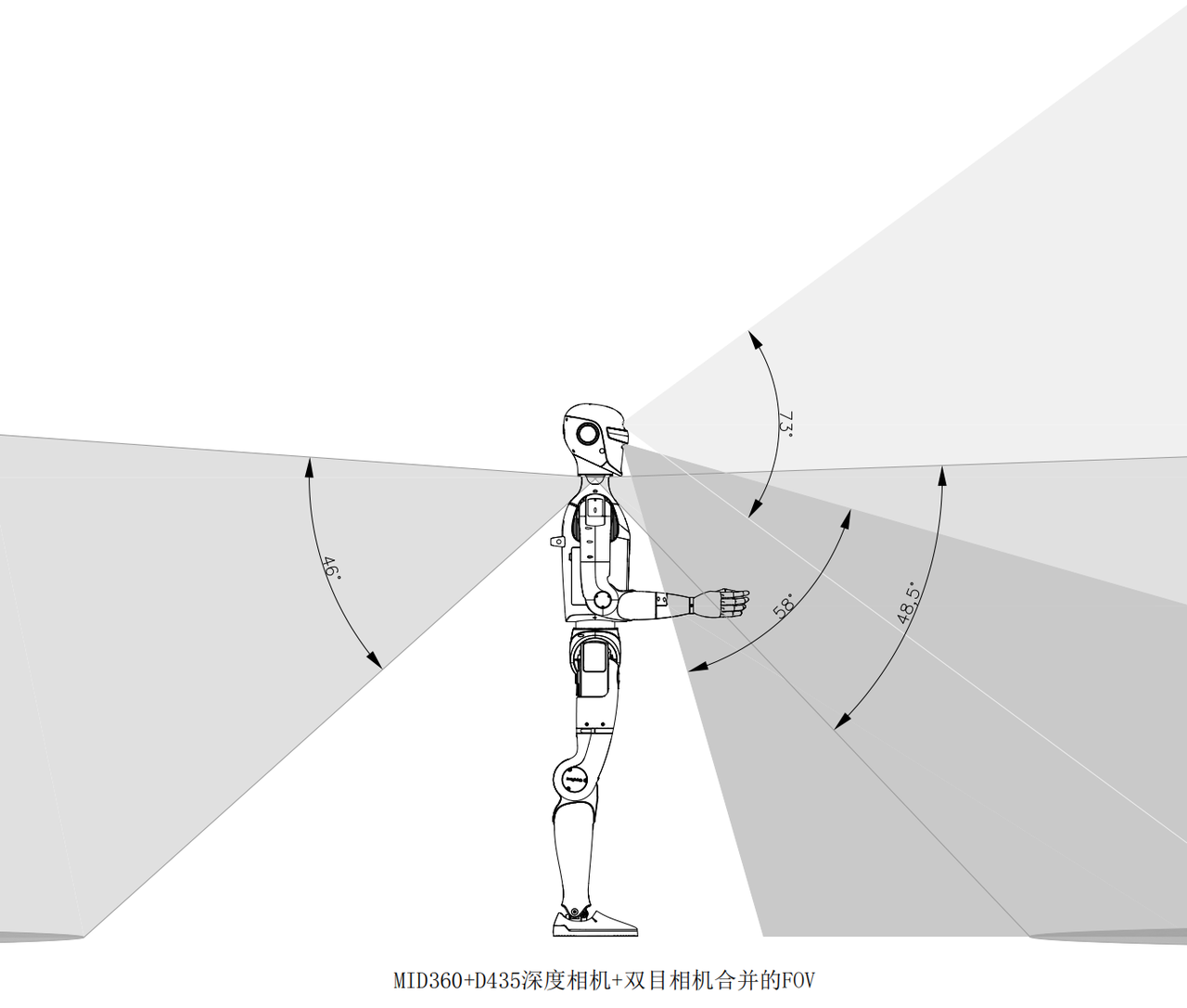
Z1 雷达与相机的视场角
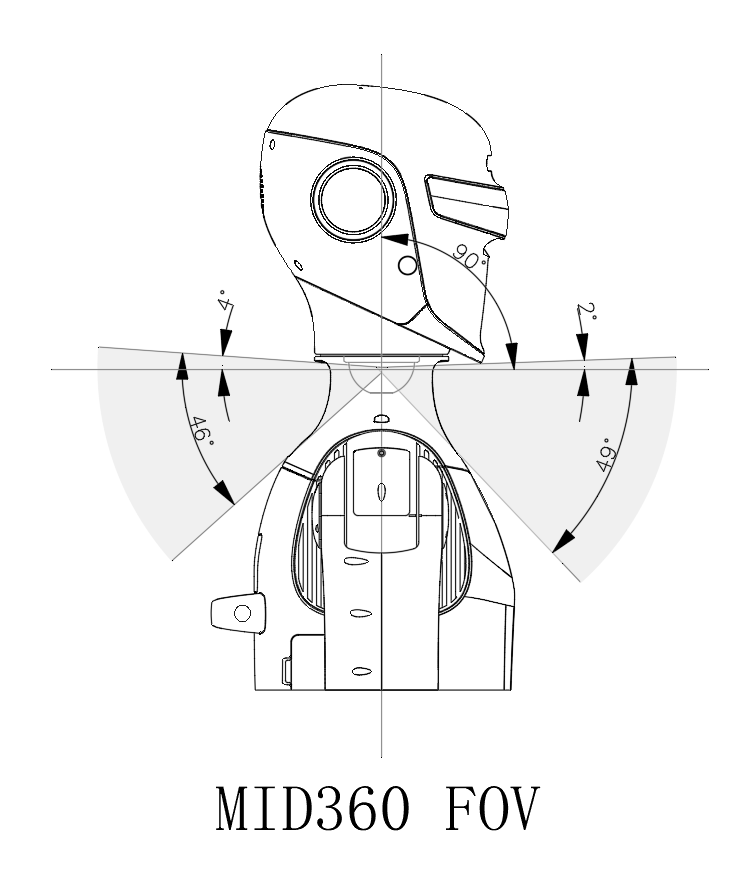
MagicBot Z1 头部搭载 LIVOX-MID360 激光雷达,为机器人提供了卓越的环境感知能力。激光雷达采用全方位、全角度的扫描技术,FOV 水平可达 360°,垂直最大 49°,能够实时获取精准的环境数据。它能够快速识别和测量周围的物体,提供高分辨率的点云数据。
Z1 头部搭载 D435i 深度相机(FOV 水平 87°,垂直 58°)与双目鱼眼相机(FOV 水平 135°,垂直 75°)。为机器人提供了卓越的视觉感知能力,能够更准确地感知和理解周围环境,实现精确的空间感知和障碍物检测,使机器人能够更智能、灵活地与环境进行交互和应对各种场景。
关节电机
MagicBot Z1 关节采用了魔法原子全栈自研电机,具备出色的性能和特点。电机的最大扭矩为 130N.m,电机结构轻量化、紧凑化。电机还配备了双编码器,提供更准确的位置和速度反馈,以满足高精度控制的需求。关节顺序名称与关节限位
| 关节序号 | 关节名称 | 限位(弧度) |
|---|---|---|
| 1 | JOINT_HIP_PITCH_L | -2.7925~2.7925 |
| 2 | JOINT_HIP_ROLL_L | -0.524~2.967 |
| 3 | JOINT_HIP_YAW_L | -2.7925~2.7925 |
| 4 | JOINT_KNEE_PITCH_L | 0~2.653 |
| 5 | JOINT_ANKLE_PITCH_L | -0.83~0.524 |
| 6 | JOINT_ANKLE_ROLL_L | -0.262~0.262 |
| 7 | JOINT_HIP_PITCH_R | -2.7925~2.7925 |
| 8 | JOINT_HIP_ROLL_R | -2.967~0.524 |
| 9 | JOINT_HIP_YAW_R | -2.7925~2.7925 |
| 10 | JOINT_KNEE_PITCH_R | 0~2.653 |
| 11 | JOINT_ANKLE_PITCH_R | -0.83~0.524 |
| 12 | JOINT_ANKLE_ROLL_R | -0.262~0.262 |
| 13 | joint_la1 | -2.88~2.88 |
| 14 | joint_la2 | -0.175~2.2515 |
| 15 | joint_la3 | -2.618~2.618 |
| 16 | joint_la4 | -0.96~1.70 |
| 17 | joint_la5 | -2.618~2.618 |
| 18 | joint_ra1 | -2.88~2.88 |
| 19 | joint_ra2 | -2.2515~0.175 |
| 20 | joint_ra3 | -2.618~2.618 |
| 21 | joint_ra4 | -0.96~1.70 |
| 22 | joint_ra5 | -2.618~2.618 |
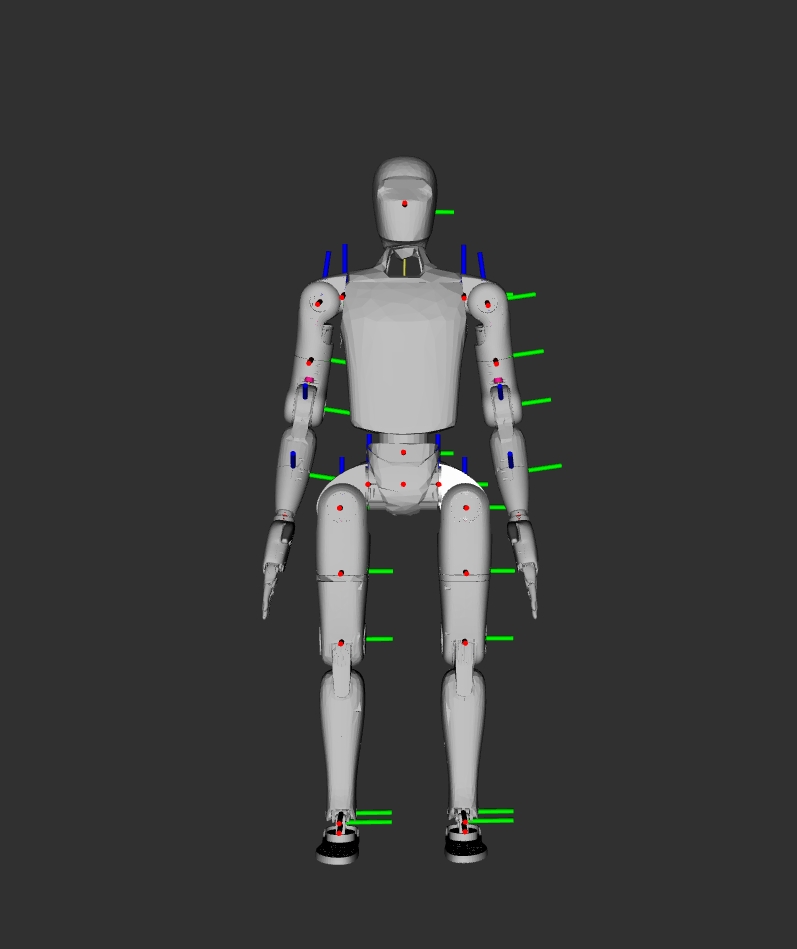
自由度配置与坐标系、关节旋转轴、关节零点
当各个关节均为零度时,各坐标系如下图。红色为 x 轴,绿色为 y 轴,蓝色为 z 轴。
规格参数
| 类别 | 规格参数 | Z1 | Z1 开发版 |
|---|---|---|---|
| 机械参数 | 高宽厚(站立) | 1369*422*200mm | 1369*422*200mm |
| 高宽厚(折叠) | 730*422*395mm | 730*422*395mm | |
| 带电池重量 | 约 40kg | 约 40kg+ | |
| 总自由度(关节数) | 24 | 24 - 50 | |
| 单腿自由度 | 6 | 6 | |
| 头部自由度 | 1 | 1 | |
| 腰部自由度 | 1 | 1 | |
| 单手臂自由度 | 5 | 5+(可加选 2 个手腕自由度) | |
| 灵巧手自由度 | / | 可选配 11 自由度触觉灵巧手 | |
| 关节输出轴承 | 工业级高刚性滚子轴承(可承受 8.7KN 冲击力) | 工业级高刚性滚子轴承(可承受 8.7KN 冲击力) | |
| 关节电机 | 低惯量高转速大过载永磁同步电机(控制频率 25kHz,高迸发力,更好散热) | 低惯量高转速大过载永磁同步电机(控制频率 25kHz,高迸发力,更好散热) | |
| 膝关节最大扭矩* | 100N.m | 130N.m | |
| 手臂最大负载* | 2kg | 3kg | |
| 小腿+大腿长度 | 0.6m | 0.6m | |
| 手臂臂展 | 约 0.5m | 约 0.5m | |
| 头部 Z 轴关节活动范围 | ±40° | ±40° | |
| 腰部 Z 轴关节活动范围 | ±160° | ±160° | |
| 膝关节关节活动范围 | 0~152°、 | 0~152°、 | |
| 髋关节活动范围 | P±160°、R-30~+110°、Y±160° | P±160°、R-30~+110°、Y±160° | |
| 电气特性 | 关节编码器 | 双编码器 | 双编码器 |
| 散热系统 | 智能风冷散热 | 智能风冷散热 | |
| 供电方式 | 15 串电池 | 15 串电池 | |
| 基础算力 | 8 核高性能 CPU | 8 核高性能 CPU | |
| 感知传感器: | 3D 激光雷达+深度相机+双目鱼眼相机+头部触觉传感器 | 3D 激光雷达+深度相机+双目鱼眼相机+头部触觉传感器 | |
| WiFi6 、蓝牙 5.2 | 有 | 有 | |
| 麦克风阵列 | 有 | 有 | |
| 5W 扬声器 | 有 | 有 | |
| 配套 | 高算力模组 | 无 | NVIDIA Jetson Orin |
| 智能电池(快拆) | 10000mAh | 10000mAh | |
| 充电器 | 62V 5A | 62V 5A | |
| 手持式遥控器 | 有 | 有 | |
| 其他 | 续航时间* | 约 2h | 约 2h |
| OTA 升级 | 支持 | 支持 | |
| 二次开发 | 无 | 有 |
*最大扭矩、手臂最大载荷、续航时间等为实验室环境下测得。
*以上参数在不同业务场景和机型配置下可能存在差异,请以实际使用体验为准。